

【机器人小知识|寄存器介绍】本文将对寄存器指令进行介绍,主要内容为数据寄存器和位置寄存器的运用。
一、寄存器指令Registers
①寄存器指令R[i]i=1~200
②位置寄存器指令PR[i]i=1~100
③位置寄存器要素指令PR[i,j]i=1~100,j=1~6
其中,i表示寄存器的号码;j表示位置寄存器的要素号码;
若需要对默认寄存器数量进行扩展,可在控制启动模式中按图1所示完成设置:
(通过PREV+NEXT+重启控制柜进入控制启动(CTRLSTART)模式)
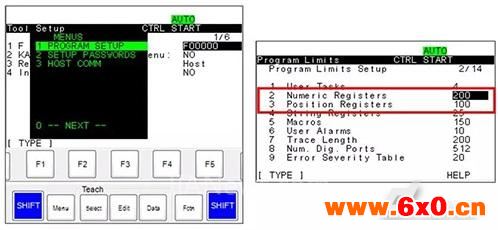
图1
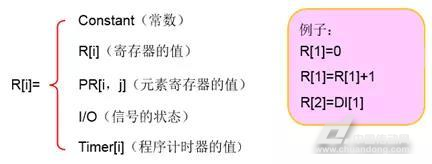
(1)数值寄存器指令R[i]
数值寄存器指令支持“=”(赋值),“+”,“-”,“*”,“/”,“MOD”,“DIV”算术运算。
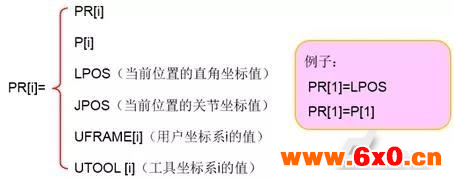
(2)位置寄存器指令PR[i]
位置寄存器指令支持“=”(赋值),“+”,“-”算术运算。
(3)位置寄存器要素指令PR[i,j]
位置寄存器要素指令支持“=”(赋值),“+”,“-”,“*”,“/”,“MOD”,“DIV”算术运算。

二、查看寄存器值
(1)查看数值寄存器的值
步骤:
1)按【Data】键,再按F1【TYPE】(类型)出现以下内容(如下图2所示):
Registers:数值寄存器;
PositionReg:位置寄存器;

图2
2)移动光标选择【Registers】(数值寄存器),按【ENTER】(回车)值键,如图3所示;

3)移动光标选择【PositionReg】(位置寄存器),按【ENTER】(回车)键,如右图5所示;

图5
4)把光标移至寄存器号后,按【ENTER】(回车)键,输入注释。
5)把光标移到值处,按F4【POSITION】(位置)键,显示具体数据信息;
“R”表示已完成示教的位置寄存器
“*”表示尚未示教的位置寄存器
6)按F5【REPRE】(形式)键,如下图6所示,移动光标到所需要的项并按【ENTER】(回车)键,或通过数字键,可以切换数据形式;
•Cartesian(正交):直角坐标系
•Joint(关节):关节坐标系

图6
7)把光标移至数据处,可以用数字键直接修改数据。
图3
3)把光标移至寄存器号后,【ENTER】(回车)键,输入注释;
4)把光标移到值处,使用数字键可直接修改数值。
(2)查看位置寄存器的值
步骤:
1)按【Data】键,显示右图4;
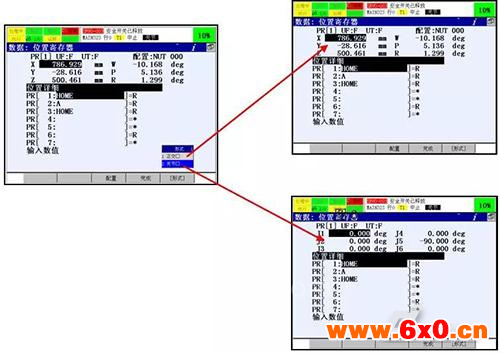
图4
2)按F1【TYPE】(类型),出现以下内容:
Registers:数值寄存器;
PositionReg:位置寄存器;








 QQ交流群
QQ交流群

