

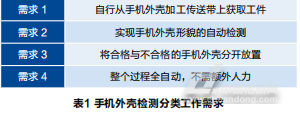
背景需求
在移动互联网时代,手机与人们的生活联系得越来越紧密,手机的需求量也在不断增长。本工作站的目标正是完成对手机外壳的检测分类工作,这在手机的生产制造中是一道十分重要的工序。手机外壳的检测分类工作主要需求如下表:
系统方案设计
为了实现上述对手机外壳检测分类的需求,本工作站采用了“机器人辅助上下料+工业相机视觉检测”的基本方案。为了提升检测抓取效率,工作站采用了双机器人的方案,即一个4轴机器人负责从外壳加工传送带上抓取工件放置到检测工作台,另一个6轴机器人负责搭载相机完成对手机外壳的拍照以及对完成检测的手机外壳分类放置,这样可以有效地将工件放置到检测台的时间与工件分类摆放的时间进行重叠而不是线性叠加,从而缩短了整个工序所需的时间。具体工作流程如图1所示。

图1系统工作流程图
根据上述动作及工艺要求,本方案主要包括硬件方案设计和软件方案设计。其中硬件方案设计包括硬件配置、结构部件和电气控制等三部分,软件方案设计包括程序流程、I/O配置、点位配置三个部分,见图2。
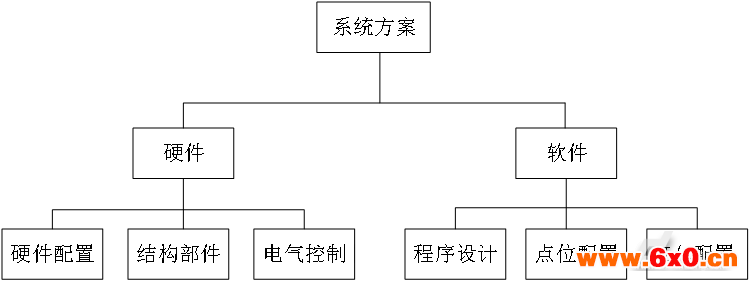
图2系统方案图
硬件方案设计
1.硬件配置
如图3所示,硬件设备主要包括:HS6型4轴机器人本体一台、HSR605型6轴机器人本体一台、久同JTR机器人控制器一台、久同JTR示教器一台、久同TSV伺服驱动器10台、传送带、指示灯、检测工作台、工件分类放置台。
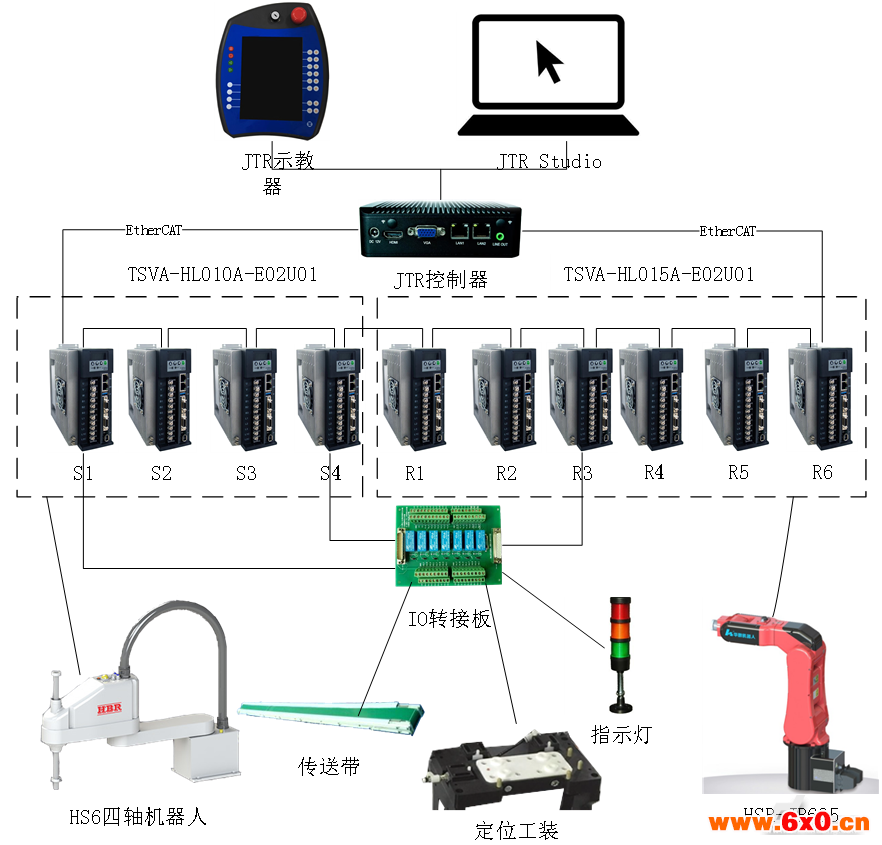
图3硬件接线示意图
2.结构部件
除了机器人本体和传送带外,主要的结构部件包括4轴机器人末端的抓取气爪、6轴机器人末端内嵌相机的气爪和具有工装定位作用的检测工作台,具体如图4所示。
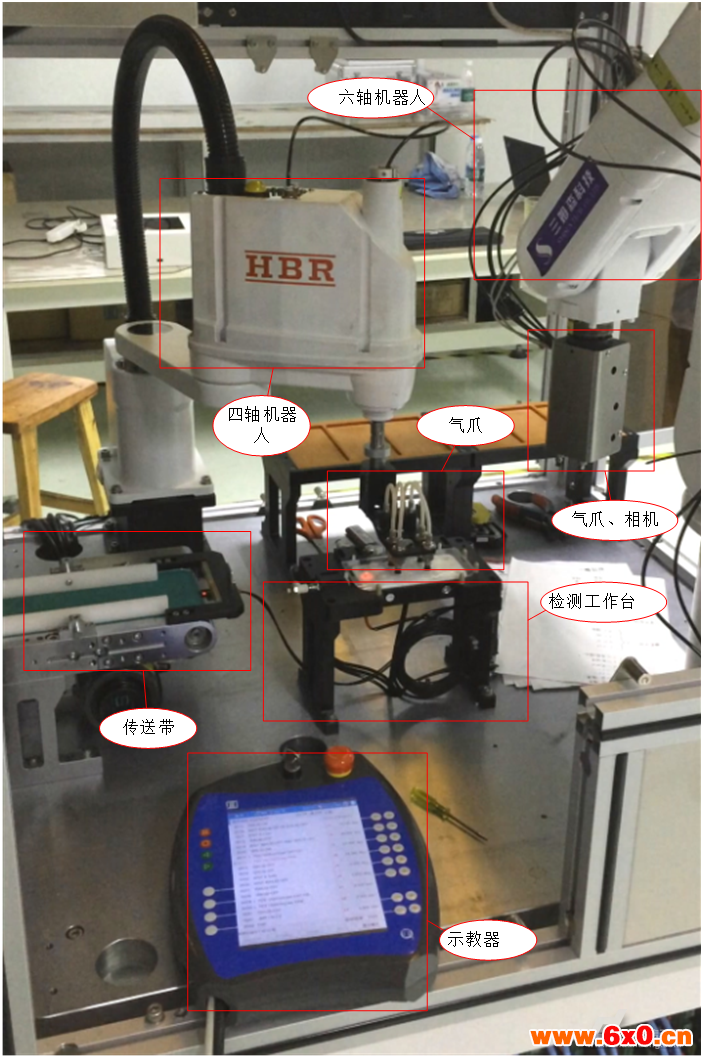
图4结构部件示意图
3.电气控制
本工作站采用机器人控制器为核心控制单元,采用Ethercat总线实现控制器与驱动器、IO板的连接,进而控制整个工作站的信号灯、激光传感器、气爪等所有外围设备。机器人电柜的接线图如图5所示。
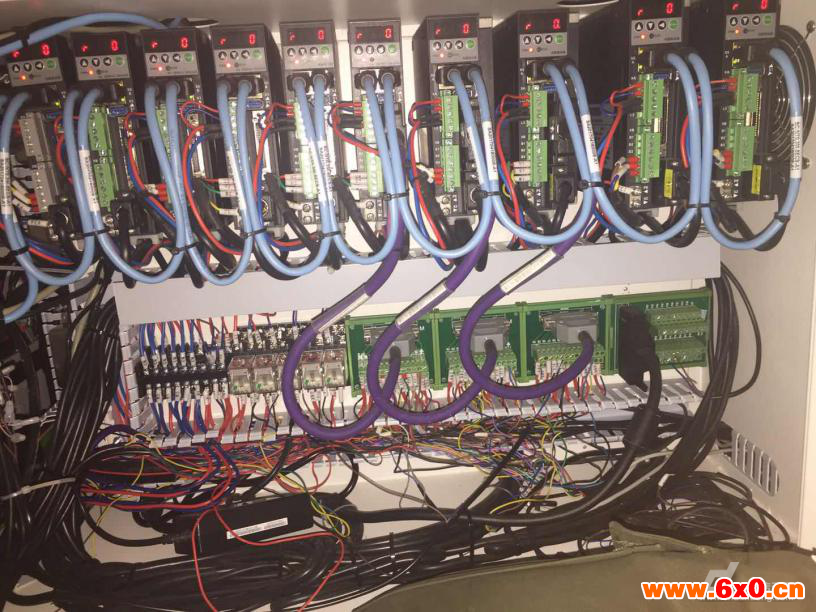
图5机器人电柜接线图
4.软件方案设计
(1)程序设计
根据手机外壳检测的工艺流程和控制要求,分别对上料机器人(4轴)和拍照放置机器人(6轴)进行了程序设计,并利用IO点位信息实现两个机器人工序上的同步。程序设计如表1所示。
表1程序设计
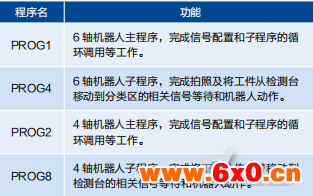
针对不同的程序,机器人控制器可以分别对不同的机器人组运行对应的程序,保证每个机器人独立的完成各自的程序动作要求。
(2)点位配置
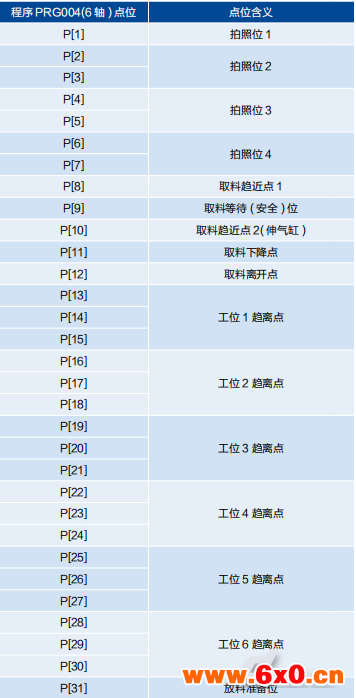
根据程序设计流程,4轴和6轴机器人的点位表如2、3。
表24轴机器人点位表

表36轴机器人点位表
(3)IO点配置
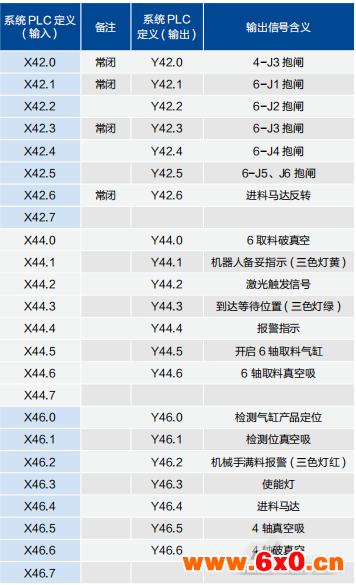
如下表所示,根据程序设计流程,对机器人控制器软PLC进行了输入输出信号配置,机器人控制器IO点位配置表如表4。
表4机器人控制器IO点位配置表
总结
本方案经测试,很好地满足了手机外壳检测分类的工艺要求,并且实现了全自动不停机检测,单个工件检测周期仅5s,检测准确率达99.98%。本方案的一个亮点是采用JRT机器人控制器,该控制器具有十分明显的优势:
其一,一台控制器代替了2台控制器,省掉了一台控制器及其连接线缆;
其二,通过Ethercat总线连接伺服IO转接,扩展十分方便;
其三,可以自由配置伺服、IO,不受摆放位置和连接顺序的限制。








 QQ交流群
QQ交流群

