

近年来,随着工业机器人的广泛应用,工业机器人及其配套产品的结构设计也日趋精细成熟。而工业机器人底座结构形式在结构强度方面的区别也显得尤为重要,为机器人底座的批量性生产提供了结构选型方面的参考。
机器人支撑座的功能与结构形式
机器人支撑座的主要功能是支撑与固定机器人,上端与机器人本体基座相连结,下端固定到地面或机架上,使机器人的工作空间与被搬运、加工的工件之间具有合适的相对位置,为机器人安全工作提供保障。
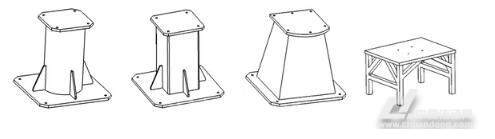
常见的机器人支撑座有圆管形结构(图1)、方管形结构(图2)和箱式结构(图3)、台架式结构(图4)。这里主要讨论前两种结构。
圆形管和方管形的强度比较
1、圆管形直径与方管形边长的关系
当圆管形和方管形支撑座的高度相同,壁厚相等,材料用量相同时,对应的直径和边长存在特定的关系。如图5、图6所示:设圆管的外径为D,内径为d;方管外边长为A,内边长为a,两者壁厚均为δ。两者横截面面积分别为Sc、Ss。
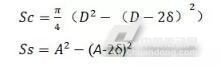
若Sc=Ss,则有:

上式表明,图5与图6的截面面积相等且边长A不变时,n值越大,壁厚就越薄,直径与边长的差值也越大;反之,壁厚越大,直径越接近边长。
图5与图6的截面面积相等且边长A不变时,n值越大,壁厚就越薄,直径与边长的差值也越大;反之,壁厚越大,直径越接近边长。
2、圆管形支撑与方管形支撑的抗弯截面模量比较

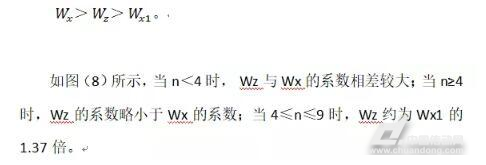
蓝、红、黑色曲线分别对应式(6~8)右侧的系数,横坐标代表自变量的序号,比如n=2对应曲线图中的横坐标值为“1”,纵坐标为相应的系数值。结合式(6~8),可知对于特定的A值,系数越大,对应情况的抗弯截面模量也越大,如图(7)所示,当n值相同(即壁厚相等)时,
3机器人支撑座工况受力分析
机器人处于准工作状态时,机器人在自重作用下,通常会对支撑座施加压力和力矩,支撑座的抗弯截面模量越大,支撑座承受这个力矩的能力越强,支撑座的结构越不容易受到破坏。
对于6R型机器人,由于转座的工作空间范围较大,通常要超过±90°,随着1轴角位置的变化,机器人对支撑座施加力矩的方位也发生变化,支撑座筒体荷载截面的中性轴也随之绕筒体轴线转动。对于方管形支撑座,当中性轴通过方形对角线时,方管截面的抗弯截面模量最小,方管的抗弯性能最差,要以此位置的抗弯截面模量做为依据来校核方管形支撑座的强度是否满足要求。
最危险点正应力为:
上式结果乘以安全系数后,要小于等于材料的许用应力[]。
对于圆管形支撑座,尽管其荷载截面的中性轴也随所受力矩的方位变化,绕筒体轴线转动,但荷载截面的抗弯截面模量都相同,因而,只是最危险点的位置发生了变化,但各个最危险点正应力大小都一样,即:
上式结果乘以安全系数后,同样要小于等于材料的许用应力,才能满足使用要求。
由此可知,在此种工况下,截面面积相同(即:材质及材料用量相同,高度相同),壁厚相同的圆管形支撑座比方管形支撑座最危险点的正应力小,结构更安全,更容易满足使用要求。
当6R型机器人底座需要在某个特定方向承受较大弯矩时,可选用方形结构。对于二轴悬臂直线导轨机器人,选用方形支撑座更经济,更安全,如图9所示:

影响支撑座结构的其他因素
本文为了比较两种支撑座的抗弯性能,主要考虑了支撑座受到的力矩作用。在实际设计支撑座结构时,还要考虑机器人本体对支撑座施加的压力,机器人工作时的负载力和惯性力。支撑座与地面的连接方式,地面的硬度,是否有水泥基础和埋地螺栓等,都会影响支撑座的结构尺寸和结构形式。此外,产造型、产品通用性、产品的生产批量、加工工艺,机器人系统的刚度需求,物料输送需求,生产运营消耗材料库存因素等也会影响支撑座的具体结构。
总结
本文以等同材质、等高度、等横截面面积的圆管形支撑座和方管形支撑座为研究对象,对比了圆环形横截面与方“回”形横截面抗弯截面模量的大小,指出了机器人支撑座在各向力矩相同的工况下,以结构强度为主影响因素,忽略其它影响因素的前提下,采用圆管形结构比采用方管形结构更经济、更安全。








 QQ交流群
QQ交流群

