

在中国,按应用环境分类,机器人专家将机器人分为两大类,即工业机器人和特种机器人。工业机器人就是面向工业领域的多关节机械手或多自由度机器人,而协作机器人与传统机器人之间并没有非常大的不同,只是基于不同的设计理念生产的工业机器人产品。
现在工业领域常见的机器人有下面两种,协作机器人(图一)和机械手臂(图二),其所用的编码器都有各自的特性化需求。
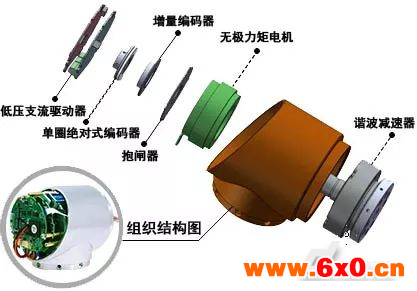

图一:协作机器人及其关节构造

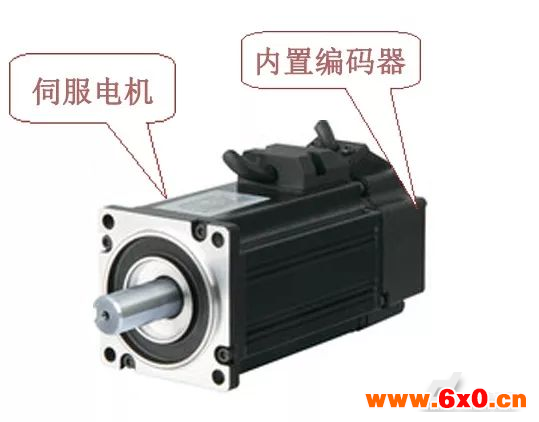
图二:机械手臂及伺服电机
协作机器人用编码器的特点:厚度薄、中空且孔径大,外径反而要求越小越好,以便于各关节的尺寸可以做得更小,机器人也就更小了;孔径大是为了中间可以走线缆,节省空间。
▼
需要注意的是,大功率的线缆不宜与编码器电缆放在同一线槽内,以避免干扰造成的信号异常。一般情况下,此类编码器都使用单圈绝对式编码器,同时配一台增量编码器。
国外产品很多都采用分体式绝对式编码器,这要求与其配套的电机技术参数非常精确,否则设备精度就会损失。
配合国内协作机器人的开发,对应关节的编码器也需要定制来配合,编码器厚度、孔径及外径等相关方面参数都需要给出相应的技术要求。
协作机器人用编码器分为整体式安装和分体式安装两种方式,整体式编码器特点就是对客户端的电机技术参数要求相对低些,安装和调试相对简单易行,成本相对高一些;如果采用分体式编码器,需要双方配合完成对应接口的设计,也是为了后续安装调试简单可行,但还是要比整体式产品安装调试复杂一些,成本相对低一些。


通用的工业机械手臂,通常采用整体的伺服电机+编码器的方式来构建机械手臂,由于伺服电机小型化的需求越来越旺盛,对应编码器的小型化和超薄化的要求也越来越强烈。伺服电机厂家都需要直径小、厚度薄、精度高且价格低的编码器。而这类电机可选用的编码器也分为整体式和分体式两种:
分体式编码器对轴向窜动、径向跳动以及止口尺寸公差等都是有相对较高的要求,电机厂家需要对电机本身参数进行确认,这样才能更好与编码器进行对接;而整体式编码器的厚度很难做到更薄了,现在国内最薄的整体式光栅编码器厚度约为20mm。虽然光栅编码器只是机器手臂内一个配件,但是在功能实现上起到举足轻重的作用。

2017年国内市场新增工业机器人约13.6万台,同比增长约60%。同时,在市场争夺战中,国产自主品牌工业机器人仍长期处于下风;现在很多机器人公司采用的关键部件只能求助于进口品牌,受制于人;其实有些国产产品在定制通讯协议和产品定制卡开发上都积累了丰富的知识和经验,并已经有多家机器人公司用国产产品完成关键环节配套。另外,近几年协作机器人的出现及增长为国产机器人带来新的机会。
国产工业化编码器已经发展五十多年了,积累了深厚的底蕴,与国外品牌的差距越来越小,有些产品已经赶超国际水平。如果能够得到各行业的支持与协同,发展和完善的步伐会越来越快,也会为各行业带来性价比更高的产品。
总之,无论编码器还是电机,乃至到行业上游产品,国产之路任重而道远,哪个环节羸弱,都会影响到整个行业的发展,受到国外产品的限制,前阶段“中兴事件”就能很好的说明一切。








 QQ交流群
QQ交流群

