

机器人是最典型的机电一体化数字化装备,技术附加值高,应用范围广,作为先进制造业的支撑技术和信息化社会的新兴产业,将对未来生产和社会发展起越来越重要的作用。从20世纪下半叶起,世界机器人产业一直保持着稳步增长的良好势头。根据发达国家产业发展与升级的历程和工业机器人产业化发展趋势,到2015年中国机器人市场的容量约达十几万台套。
1工业机器人的基本工作原理
工业机器人是一种生产装备,其基本功能是提供作业所须的运动和动力.其基本工作原理是通过操作机上各运动构件的运动.自动地实现手部作业的动作功能及技术要求。因此在基本功能及基本工作原理上,工业机器人与机床有相同之处:二者的末端执行器都有位置变化要求,而且都是通过坐标运动来实现末端执行器的位置变化要求。当然机器人也有其独特的要求,是按关节形式运动为主,同时机器人的灵活性要求很高,其刚度、精度要求相对较低。
2工业机器人结构系统
2.1工业机器人构造
从功能角度分析可将机器人分解成四个部分:操作机、末端执行器、传感系统、控制器。操作机:是由机座、手臂和手腕、传动机构、驱动系统等组成.其功能是使手腕具有某种工作空间,并调整手腕使末端执行器实现作业任务要求的动作。末端执行器:也叫工业机器人的手部,它是安装在工业机器人手腕上直接抓握工件或执行作业的部件。感器系统:是指要机器人与人一样有效的完成工作。必须对外界状况进行判断的感觉功能。与机器人控制最紧密相关的是触觉。视觉适合于检测对象是否存在,检测其大概的位置、姿势等状态。相比之下,触觉协助视觉.能够检测出对象更细微的状态。控制器:机器人控制系统是机器人的大脑,是决定机器人功能和性能的主要因素。主要是控制工业机器人在工作空间中的运动位置、姿态和轨迹、操作顺序及动作的时间等。具有编程简单、软件菜单操作、友好的人机交互界面、在线操作提示和使用方便等特点。在机器人中采用的控制系统有:点位的和轮廓的;同步的和异步的;数字的和模拟的。可根据机器人的技术与经济要求及工艺任务的特点来选择控制系统的具体方案。
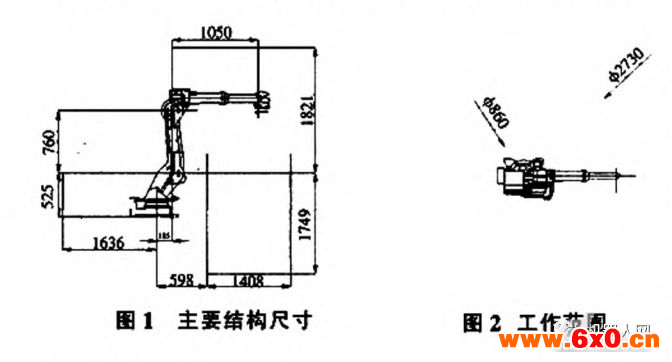
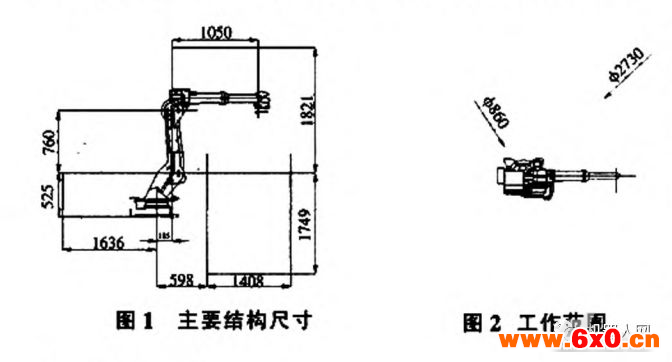
2.2主要结构尺寸
根据AII—V6L型工业机器人的主要参数进行设计。主要结构尺寸如图I所示。机器人的工作范围见图2。
3.1手腕结构的确定
手腕是联接手臂和末端执行器的部件,其功能是在手臂和机座实现了末端执行器在作业空间的三个位置坐标(自由度)的基础上,再由手腕来实现末端执行器在作业空间的三个姿态(方位)坐标,即实现三个旋转自由度。通过机械接口,联接并支承末端执行器。根据机器人的作业要求来决定其应具有的自由度数目。
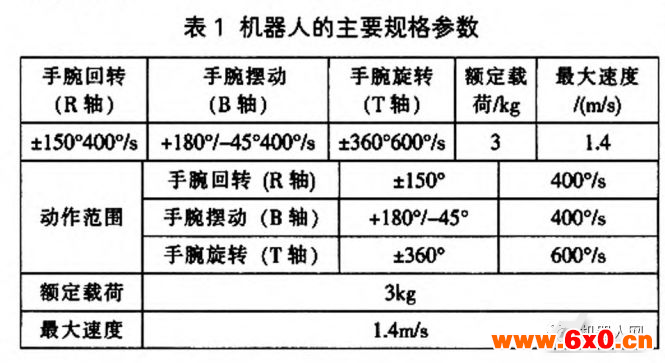
3.2基本参数的确定
确定了空间结构和手腕结构后,可确定手腕回转、手腕摆动及手腕旋转三个姿态的自由度。其参数见表l(参数来于SSA2000工业机器人)。
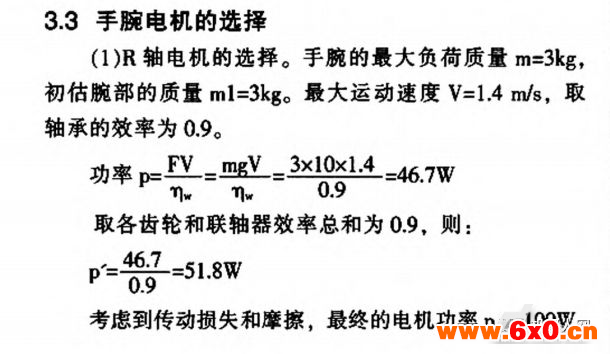
选择型号为SGMAH-0IA,额定功率为IOOW,额定转矩为0.318N·m。额定转速为3000rlmin,重量为0.7kg的交流伺服电动机。(2)B轴和T轴电机的选择。根据设计要求取相同型号的电机.选择型号为SGMAH-01A交流伺服电动机。
3.4传动比的确定
3.5谐波减速器的选择
谐波齿轮减速器是一种新型的机械传动变速机构。与普通齿轮传动相比,具有体积小,重量轻,结构简单.它与传动比相当的普通减速器比较,其零件减少50%。体积和重量均减少l,3左右或更多。传动比范围大(单级传动比为40~350,多级传动比可达1600~100000),传动效率高(单级传动效率饥≥85%),传动精度高.承载能力强等特点。根据所选择的电机.选择型号为SGMAH—OIA。额定功率为looW,额定转矩为0.318N·m,额定转速为3000drain的交流伺服电动机。同时选择XBl谐波减速机,机型为25,减速比为40,输出力矩为1.0N·m,输入转速为3000r/min。为了订货和维修方便,三轴均采用同一种减速器。
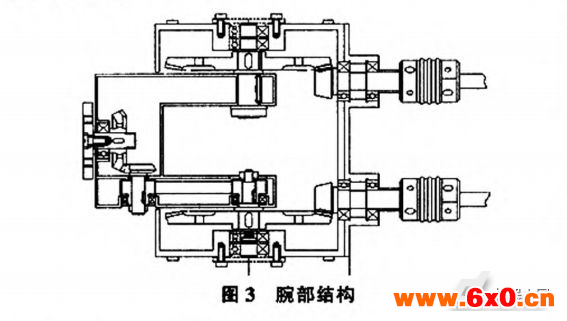
3.6壳体的设计
机座部分采用铸铝材料,方形结构,臂厚5~12mm。机身部分采用铸铝材料,圆筒形结构,臂厚-8mm。大臂外壳采用铸铝材料.厚度均为6-Smm。小臂箱体和小臂外壳采用铸铝材料,结构为方形,侧面为铸件其它三面为铸铝板材。手腕外壳和手腕箱体采用铸铝材料,结构为方形,两侧面、背面、底面为铸件,端面和正面为铸铝板材。臂厚5-8ram。其它部分具体尺寸由结构决定.见图3。
4机器人轴承设计
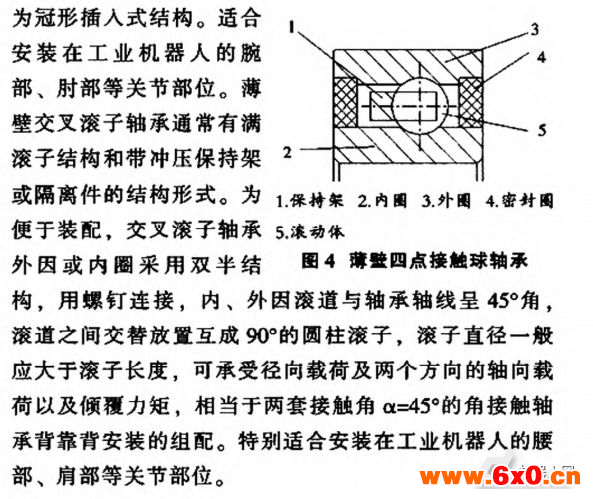
球轴承是机器人和机械手机构中最常用的轴承。它能承受径向和轴向载荷。摩擦较小。其机器人专用轴承四点接触式设计以及高精度加工。这种轴承比同等轴径的常规中系列四点接触轴承轻25倍。它的内圈(或外圈)由两个半圈精确拼配而成,而其整体外围(或内圈)的沟曲率半径较小,使钢球与内、外圈在四个“点”上接触。既加大了径向负荷能力.又能以紧凑的尺寸承受很的两个方向的轴向负荷,并且有很好的两个方向的轴向限位能力,因为它的轴向游隙相对较小。而其接触角(一般取为35。)又较大。工业机器人专用薄壁四点接触球轴承通常有带密封圈和不带密封圈的结构形式(见图4)。其主要由内圈、外围、保持架、钢球或非接触式密封圈组成。内、外圈均为整体结构。钢球与内、外因沟道呈四点接触.保持架
5结束语
各种工业机器人可以以单机形式使用,也可以作为生产系统中的一种构成部分使用。随着社会需求发展的变化,工业生产多品种小批量方向发展,对制造系统的柔性要求越来越高。工业机器人灵活性好。因此在柔性制造系统内各种应用越来越多。








 QQ交流群
QQ交流群

