

弧焊就是通过电弧将两种或两种以上材料达到原子之间的永久性连接的工艺过程,广泛用于各行各业中。完成这一工艺过程,需要焊接电流回路和焊接轨迹。在机器人智能弧焊过程中,焊接电流回路由焊机和机器人腕部的焊枪来完成,焊接轨迹则由机器人来完成。
FANUC机器人弧焊应用
FANUC针对弧焊方面的应用开发了相应的软件包,常见的FANUC弧焊机器人应用有:摆焊(weave)、接触点寻位(touchsensing)、电弧跟踪(TAST)、协调(COORD)、多层多道(ramp)等。此外,智能视觉系统、离线编程等也应用于焊接系统中,提高了焊接的智能化与焊接效率。
1.FANUC智能视觉焊接
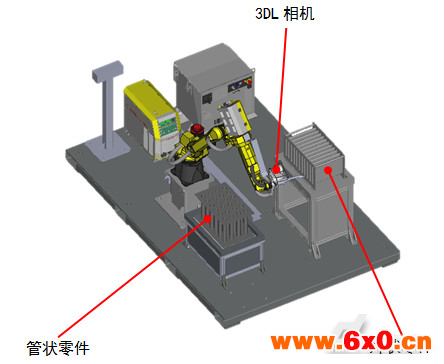
采用FANUC机器人配合FANUCiRVision智能视觉功能,可实现焊缝的智能识别,提高焊接的自适应性与焊接精度。采用2D或3DL相机对工件形状进行识别,确定出工件上的焊缝位置后机器人手持焊枪对工件进行焊接,为机器人自动化焊接提供高精度、智能化的解决方案。
图为FANUC智能视觉焊接系统在管板焊接行业的应用。
FANUC智能视觉焊接系统系统具有以下特点:
FANUCiRVision3DL视觉系统,通过二维图形处理和三维激光检测的混合测量,可用于具有三维位置偏差的工件位置检测。
FANUCiRVision智能视觉功能可以辅助快速识别、定位工件,节省专业的工装夹具费用或降低工装夹具高精度定位及复杂性的要求,有效地提高了生产系统的柔性化和智能化水平。
FANUCiRVision智能视觉功能集成于机器人系统中,使用示教器可以方便进行视觉设定和运行状况查看。
2.FANUC机器人协调功能
FANUC机器人协调功能是FANUC机器人与变位机协调完成焊接轨迹的功能。在弧焊过程中,焊接速度是影响焊接质量的重要因素之一,在协调功能下,能保证TCP相对变位机上的工件的速度一定。

焊接中采用FANUC机器人协调功能有以下优点:
可以焊接复杂焊缝;
机器人焊接时姿态更好;
焊枪相对于焊缝的工艺角度更好。
3.FANUCROBOGUIDE离线编程
鉴于弧焊自动化产线工作量比较大,使用传统的手工示教需要整线停止,因此会影响产线的产能。采用FANUCROBOGUIDE离线编程功能弥补了这一弊端,可通过FANUCROBOGUIDE仿真软件进行离线条件下的焊接轨迹示教或整条焊缝的选取。
FANUCROBOGUIDE离线编程基本步骤:
导入数模
将现场设备的数模导入FANUCROBOGUIDE仿真软件中,并使机器人的坐标系设置与现场中相同。
焊接轨迹的选择
通过FANUCROBOGUIDE离线编程功能选择焊接轨迹时,可通过ROBOGUIDE软件上的TP逐个点进行示教,也可直接选取数模上的某条线作为焊缝,省去了逐个点示教的繁琐。

生成程序
选取数模上的某条线作为焊缝,程序可以自动生成,无须逐句编写。
程序导入现场
将FANUCROBOGUIDE离线编程生成的程序导入现场FANUC机器人控制柜中,程序可直接运行。
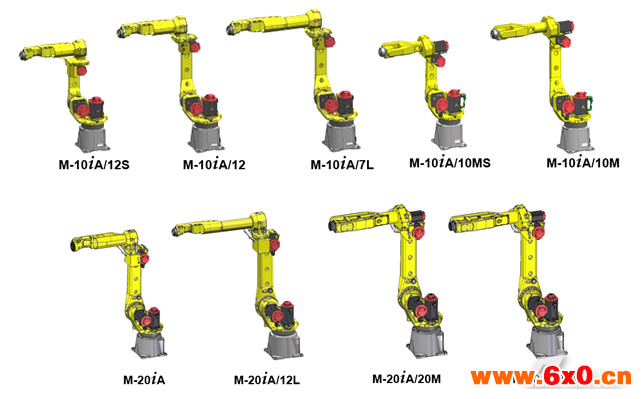
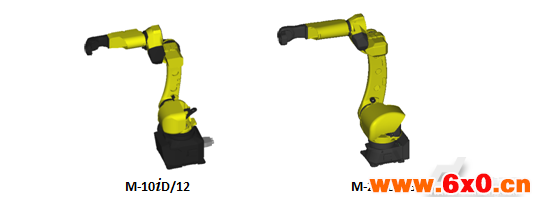
焊接机器人
针对弧焊应用领域,FANUC常用的弧焊机器人系列主要有M-10iA系列、M-20iA系列以及M-10iD/12、M-20iD/25新机型等。
声明:本文为转载类文章,如涉及版权问题,请及时联系我们删除(QQ: 2737591964),不便之处,敬请谅解!








 QQ交流群
QQ交流群

