

机器人是自动执行工作的机器装置。它既可以接受人类指挥,又可以运行预先编排的程序,也可以根据以人工智能技术制定的原则纲领行动。它的任务是协助或取代人类的工作,例如生产业、建筑业,或者危险的工作。它是高级整合控制论、机械电子、计算机、材料和仿生学的产物。在工业、医学、农业、建筑业甚至军事等领域中均有重要用途。我国的机器人专家从应用环境出发,将机器人分为两大类,即工业机器人和特种机器人。工业机器人就是面向工业领域的多关节机械手或多自由度机器人。而特种机器人则是除工业机器人之外的、用于非制造业并服务于人类的各种先进机器人。然而,现有的机器人专用控制器上缺少有助于提供不同类型或功能控制元件安装区域及便于查找或维修电控元件的装置,还有的机器人专用控制器上缺少有助于各种功能的箱体导线接头快速连接的装置,不能满足实际情况的需求。
1机器人专用控制器的设计
拟设计的机器人专用控制器,包括控制箱、连接座、中转箱和设备箱,控制箱连接分配箱,分配箱与中转箱通过接头器套相连接,连接座位于分配箱左端。
作为本设计的优选技术方案,所述接头器套上设有螺纹和导向槽,螺纹为细牙螺纹,导向槽位于螺纹的两侧,导向槽内设有耐磨涂层,耐磨涂层的端部设有限位柱;中转箱上设有卡紧组件;设备箱内设有防锈涂层,防锈涂层上设有阻燃涂层,阻燃涂层上设有包裹层,包裹层为高分子聚合物膜。现场使用时,操作人员首先将装置整体安装到合适位置,再将装置整体固定;其次,将不同类型或功能控制元件和便于查找或维修电控元件分别安装在控制箱、中转箱、设备箱和分配箱内;最后,将各种功能的箱体导线接头通过连接座、接头器套和卡紧组件快速连接,即可进行机器人控制元件安装工作。
与现有的技术相比,本设计的有益效果:通过设置控制箱、中转箱、设备箱和分配箱有助于提供不同类型或功能控制元件安装区域及便于查找或维修电控元件。通过设置连接座、接头器套和卡紧组件有助于各种功能的箱体导线接头快速连接,且结构简单,操作方便,经济实用。
具体实施方式:为了使本设计的目的、技术方案及优点更加清楚明白,结合图1及实施例,对本设计进行进一步详细说明。应当理解,此处所描述的具体实例仅仅用以解释本设计,并不用于限定本设计。
图1为本设计的结构示意图。
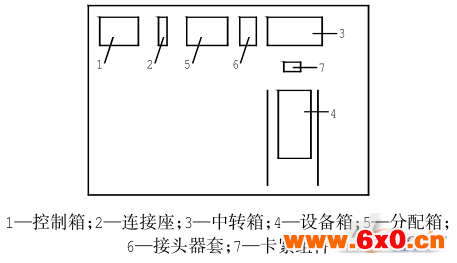
图1机器人控制器结构示意图
本设计有一种机器人专用控制器,包括控制箱、连接座、中转箱和设备箱。设备箱内设有防锈涂层,防锈涂层上设有阻燃涂层,阻燃涂层上设有包裹层,包裹层为高分子聚合物膜,控制箱、中转箱、设备箱和分配箱。有助于提供不同类型或功能控制元件安装区域及便于查找或维修电控元件。
控制箱1连接分配箱5,分配箱5与中转箱3通过接头器套6相连接,连接座2、接头器套6和卡紧组件7有助于各种功能的箱体1导线接头快速连接,接头器套6上设有螺纹和导向槽,螺纹为细牙螺纹,导向槽位于螺纹的两侧,导向槽内设有耐磨涂层,耐磨涂层的端部设有限位柱,连接座2位于分配箱5左端,中转箱3上设有卡紧组件7。
现场使用时,操作人员首先将装置整体安装到合适位置,再将装置整体固定;其次,将不同类型或功能控制元件和便于查找或维修电控元件分别安装在控制箱1、中转箱3、设备箱4和分配箱5内;最后,将各种功能的箱体导线接头通过连接座2、接头器套6和卡紧组件7快速连接,即可进行机器人控制元件安装工作。
2应用实例
2.1基本情况
本项目研发的类人型智能格斗机器人是以北魏中期都城平成武士为主题背景设计而成,将类人型机器人与体感技术组合的新型机器人,它充分利用和发挥了类人型机器人的特点和优点,实现了人机互动的发展。该功能实现的技术基础在于精巧而独特的机械结构设计和良好的动作控制驱动。对机器人而言,关键在于机器人机械结构和驱动单元的优化设计,其设计出来的主要功能是完成激烈的格斗表演。根据设计内容和需求确定机器人设计方案,利用舵机驱动和舵机控制板控制来实现格斗动作表演,根据体感模拟器的指令,设计的具有人体功能、模拟格斗动作的新型类人型机器人“平城武士”,参考人体的结构完成基本动作:可以前进后退,左右侧行,左右转弯,低姿行走和高姿行走躲避攻击,也可进行简单的格斗动作行走频率为每秒两步,举手投足、转圈、头部动作灵活、并具备的语音功能。通过语音识别技术,可以与“平城武士”进行简单的人机对话。其足部采用类三角结构,具有极强的抗压效果,且稳定性强。
2.2特性说明
1)运动性能。机器人应该具有较好的机动性和灵活性,能够平稳快速的完成前进、后退、转向等动作,此外要确保机器人运动的平稳性,避免出现翻倒的情况。
2)坚固性。在机械设计上,应使机器人具有较好的坚固性,在机器人做舞蹈动作或行进过程中,各种接插件不能松动、脱落。
3)可靠性。由于机器人控制系统元器件众多,有来自各方面的干扰,这些干扰对机器人控制系统硬件线路和软件程序设计都提出了一定的要求。
4)可维护性。对于一个装置而言,可维护性是十分重要的。维护应该包括硬件维护和软件维护。因此在硬件结构设计时要考虑便于安装拆卸、调试检测;软件上采用模块化结构设计,以便于测试、升级。
5)经济性。选用合适的控制方案,选用性价比高的功能器件,既满足系统的功能要求,又可以节约成本。从以上分析可以看出,在机器人的体积和重量受限的前提下,要设计具有上述功能的机器人,其关键在于采用高集成度、微型化技术和解决结构优化问题。
6)技术普及化。制作详细的教程,出售散件,把相关技术简单化,便于学习和普及。
2.3方案介绍
目前国内外类人型机器人的研究是独立进行的,并未进行组合研究。平城武士格斗机器人是将类人型机器人与体感技术结合在一起的格斗机器人,外观采用3D打印材料,机身由铝合金板材、不锈钢薄片、舵机、控制器及其支架等材料设计完成。新型机器人“武士”的设计,是充分的利用和发挥类人型机器人和体感技术的特点和优点。该功能实现的技术基础是精巧而独特的机械结构设计和良好的控制器驱动。在设计中,应用了类人的机械结构。平城武士格斗机器人有自动、遥控和人机互动三种操作方式。自动模式可以将预先编写好的动作程序通过控制器向机器人发送指令,使其跟随音乐自主表演;遥控模式可以由用户通过手柄向机器人发送指令从而让其做出相应动作,可以实现高、中、低姿态的前进、后退、转弯等;在互动模式上,采用体感技术,进行完美的人机互动。三种模式可以根据需求随意切换,方便并富有乐趣。
从技术的角度来看,采用交互方式,有别于目前主流的按键(键盘鼠标,遥控器等)和触摸(平板、智能手机等)交互方式,在很多科幻片里面,都可以看到体感交互技术的展示,如《少数派报告》中的经典片段。这项技术能够带来全新的体验,能够完成其他技术无法完成的。体感技术可使机器人自然地与周边的装置或环境进行互动,这种交互方式显然要比按键交互和触摸交互更加有优势一些。但是其特点并不是为了替代前两者而存在的。它能够更容易的被人们使用,接受并掌握,这样才有利于它的普及。这就要求对体感技术交互技术提出了更高的要求,对其准确性、智能性要求更高。
3结论
1)本设计涉及一种机器人专用控制器,包括控制箱、连接座、中转箱和设备箱,有助于提供不同类型或功能控制元件安装区域及便于查找或维修电控元件。
2)设计一中类人形机器人,独特的机械结构设计和良好的控制器驱动,实现体感互动。
声明:本文为转载类文章,如涉及版权问题,请及时联系我们删除(QQ:2737591964),不便之处,敬请谅解!








 QQ交流群
QQ交流群

