

摘要
在工业生产过程中,相对于传统测量包装方法,机器人技术的最大优点是快速、准确、可靠与智能化。本文介绍一种工业继电器智能化包装的电气设计和机械机构设计方案。
关键词工业机器人;工业继电器;智能化包装
前言
经过调查后发现,一般人工包装一盒继电器的时间大约在15~22秒之间,如果在包装过程中需要更换产品种类或型号所产生的生产停顿时间较长,其中更换产品包装盒与产品非常繁琐及费时。另外有部分工厂使用了自动包装机,这种非标准定制的自动包装机采购成本相当高,并且每台机器只能包装指定的品种和型号,无法满足一机多用的功能。
进一步测量统计后发现,继电器外形尺寸相差无几,但是不同电压、不同触点对数的继电器较难区分。另外包装纸盒与内部PVC固定架的配套厂家在生产时为方便区分与管理,进行过冲孔标记或模具文字标记等型号标记,因此要求相应继电器必须放入到指定的包装盒内。为此使用工业机器人系统来实现该项工作,为生产厂家提供高效的包装效率与缩减用于包装上的人工成本。
利用工业机器人实现继电器一机多用的自动包装,需要解决机器人抓取机构、包装盒自动拆装机构、原料智能管理仓储、工业视觉传感器自动识别、系统设备联网及自动控制等技术。
智能化控制系统构成
工业继电器包装智能化系统是一套基于工业机器人的智能设备(图1),整体由工业机器人、PLC、触摸屏、工业相机、伺服驱动器及电机等组成。它可以实现对继电器的抓取、摆放、识别,以及对继电器包装盒的移动、掀开、合上等动作。在此过程中,通过HMI的可视化界面,实现各种操作画面,并且通过机器人的SSCNETⅢ网络控制附加轴的伺服电机,实现继电器的快速供料。
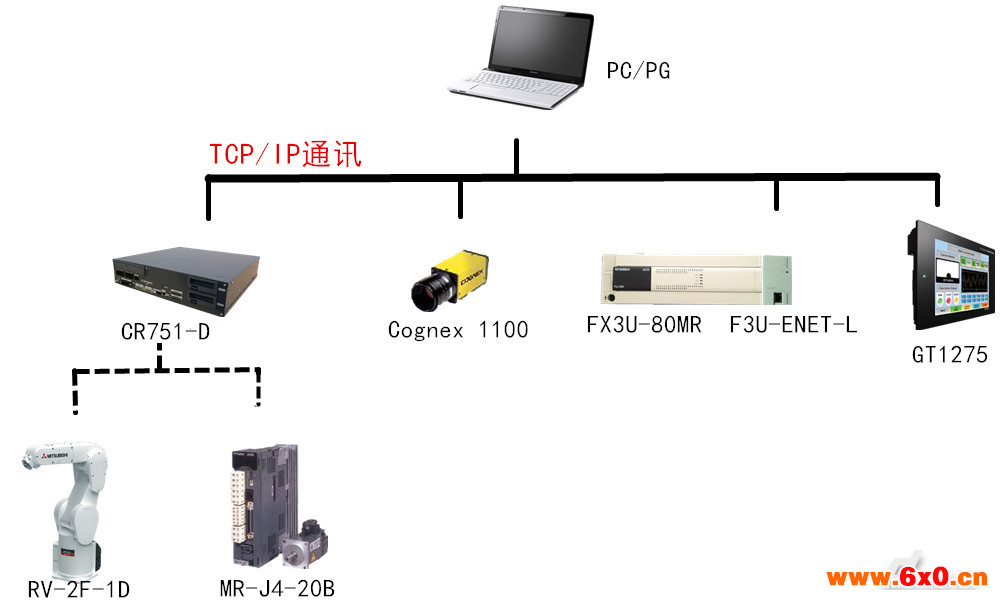
图1三菱FR-2F工业机器人象棋教学仪器的构成
(1)三菱FR-2F工业机器人
三菱FR-2F型工业机器人是由日本三菱电机株式会社设计、制造的一款多用途立式机器人,该机械手由机器人本体FR-2F-1D与控制器CR751-D组成,最大可搬运2Kg的物品。FR-2F-1D是一款仿人型的立式机械手臂,可实现空间任意位置的6自由度运动。其中J1轴的基座用于固定,J6轴的法兰面用于安装气动抓手。与机械手臂相配套的是CR751-D型机器人控制器,内部集成多种串联接口。
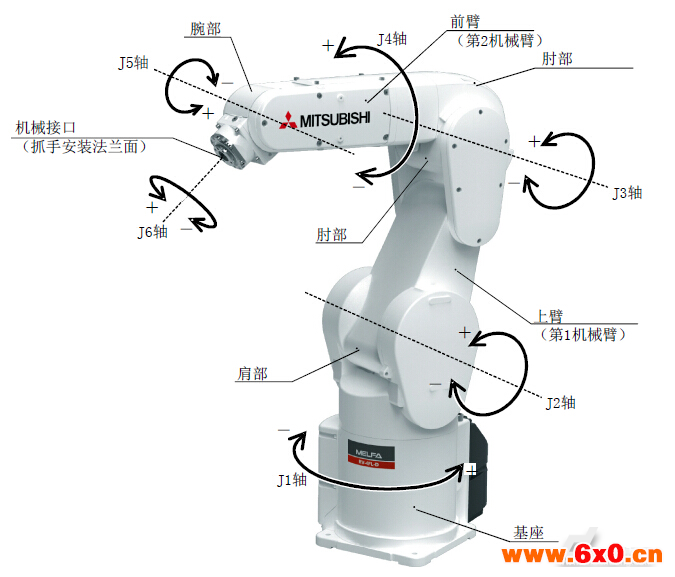
图2三菱FR-2F-1D工业机器人本体
(2)示教器
R33TB是一款用于三菱工业机器人的简易版示教单元。主要用于对机器人进行程序的创建、修改、管理及动作位置的示教、JOG进给等,在多个台机器人的情况下可实现断电多台插拔,使用时将示教器的连接线插入控制器的TB接口。

图2三菱R33TB示教器
R57TB是一款高功能版机器人示教单元。用于进行程序的创建、修改、管理及动作位置的示教、JOG进给等。该高功能版示教单元配备了使用触摸屏的图形用户接口(GUI),可以简便地进行操作。

图3三菱R57TB示教器
(3)COGNEX1100工业视觉传感器
康耐视产品包括广泛应用于全世界的工厂、仓库及配送中心的条码读码器、机器视觉传感器和机器视觉系统。与传统相机比,工业相机可实现程序的编辑与图形对比,可长时间工作,并且具有防水、防尘能力。

图4COGNEX1100工业视觉传感器
康耐视视觉产品具有开放的通讯协议和控制用I/O,可以通过网络使用直观的用户界面进行远程配置。运行期间,可通过该界面远程监视传感器的操作。还可以远程控制这些传感器以更改设置和检索结果。本设计使用的是In-SightMicro1100型黑白相机。
(4)三菱FX3U-80MR型PLC
在整套设计中,PLC起着中间数据传输与逻辑处理的功能,为此采用三菱的FX3U系类。由于PLC输出信号有开关信号(例如机器人的启动、急停信号)和电平信号(例如视觉传感器的拍照信号),因此采用继电器输出。为了以后进行改造、功能扩展,为此采用80个点的FX3U-80MR/ES-A型PLC。
(5)FX3U-ENET-L以太网通信模块
由于整套系统用TCP/IP通信协议通讯,为此PLC上需要加挂一个用于通讯的FX3U-ENET-L以太网模块。该模块拥有一个RJ45通讯接口,加挂于PLC的模块扩展口,通过程序编辑,可实现以太网数据交换。
(6)GT1275触摸屏
三菱GT1275-VNBA属于三菱可视化设备GOT1000系列中的高性能触摸屏,拥有一块分辨率为640×480的256色TFT显示屏,支持单点触控。内置3MB内存,满足一般用户使用需求,另外拥有一个USB接口、一个以太网接口、一个RS-232接口、一个RS-422/RS-485接口,并且支持CF卡。
(7)MR-J4伺服系统
由于三菱CR751-D型机器人控制器其附加轴,支持三菱MR-J3-B与MR-J4-B型伺服驱动系统。本次本设计使用的是MR-J4-20B型伺服驱动器和HG-KR23J伺服电机。该伺服驱动系统功率为200W,最高转速3000r/min,最大可拖动0.98Kg。
(8)邦纳安全光幕
美国邦纳公司EZ-SCREEN二级光幕相应速度快、灵敏度较高,因此本设计的安全光幕使用LS2TR30-600QB型光幕。
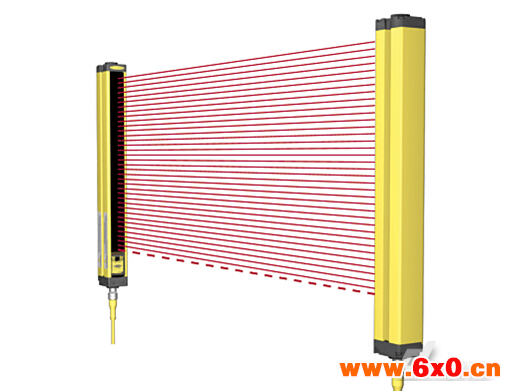
图5BANNER安全光幕
设备硬件连接
(1)三菱FR-2F机器人接线
三菱FR-2F工业机器人,分为FR-2F-D机器人本体与CR751-D控制器两部分,另外还有R33TB或R57TB示教单元。整套系统只需对机器人控制器进行供电,在控制器的ACIN接口1、3脚插入交流220V的市电即可。
机器人本体与控制器之间的连接只需将CN1与CN2相连即可。CN1在控制器上的接口分为AMP1、AMP2、BRK三个接口,其中AMP1与AMP2为机器人电机电源用线,BRK为电机制动单元用线;在机器人上CN1接口为圆形航空接头。CN2接口为伺服电机信号线,只需两侧连接即可。机器人的示教单元R33TB或R57TB连接时(二选一),只需将示教器的插头线连接到控制器上的TB接口即可。
机器人附加轴的SSCNETⅢ网络,需要配上伺服电机驱动器与伺服电机。SSCNETⅢ网络的脉冲信号由控制器的ExtOPT口通过光纤传输到伺服电机控制器上,而伺服电机的启停、急停等信号通过SNUSR接口输出。
机器人上还需一个I/O信号给定接口,接在SNUSR1接口上。在SNRSR1接口上需要给机器人控制器手/自动切换信号,以及机器人的急停信号,具体接线看图6。
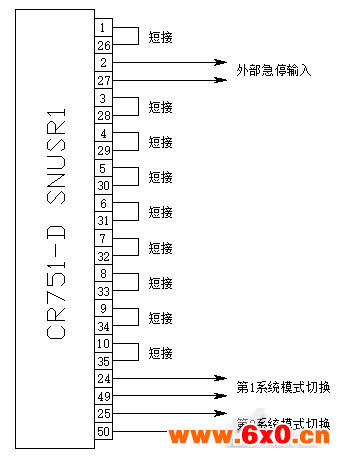
图6SNUSR1接口接线
机器人还需TCP/IP通信,为此在机器人控制器的LAN接口上插入一条RJ45标准8芯网线,与交换机相连接。在机器人控制器的USB口上接入一条USB通信线,就可通过RTToolBox2对机器人控制器进行参数设置、程序编辑等。图7所示为机器人CR751-D控制器接线效果图。

图7机器人CR751-D控制器接线效果图
(2)三菱MR-J4-20B伺服接线
三菱MR-J4伺服系统用于机器人的附加轴上,本设计使用一条附加轴。在伺服驱动器上,将220V的市电送到CNP1的L1和L3两个供电口,并且把控制部分供电端L11与L21并联。将CNP3的输出端U/V/W接到HG-KR23J伺服电机上,并将伺服电机的编码器连接线接到CN2接口。而伺服的位置信号通过SSCNETⅢ网络光纤接到CN1A接口。
如图8所示,伺服电机的控制线连接到CN3接口,将10号端子接到DC24V,将2、4、12、19号端子并联接0V,通过这样连接,伺服电机始终是启动状态。由于伺服电机使用的是绝对位置编码器,为此在CN4口上接上一块锂离子电池,用于保存位置信息。
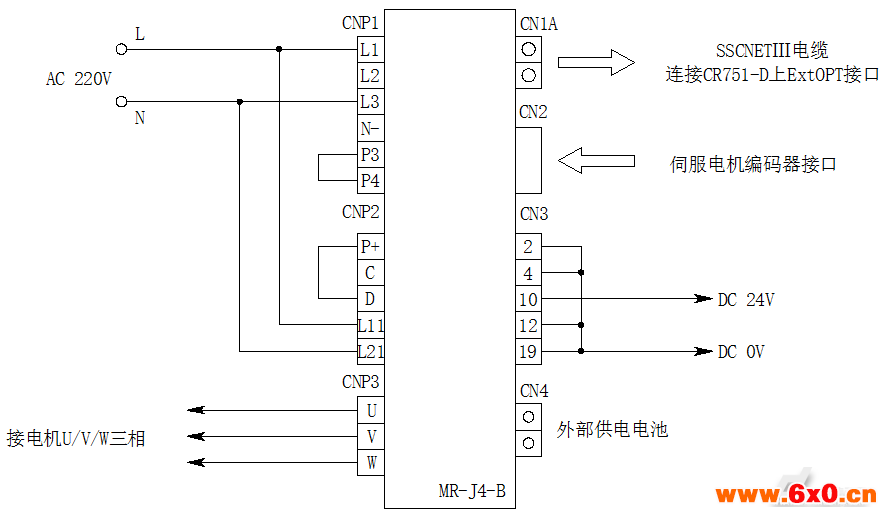
图8伺服电机接线图
(4)三菱FX3U-80MRPLC接线
三菱FX3U-80MR型PLC在整套系统中起着中间数据处理与机器人启动信信号、急停信号的给定,以及视觉相机拍照脉冲的给定等作用。因此,将气动抓手的加紧信号,以及伺服电机的限位信号、零点信号送入PLC。另外还需将外部按钮、急停开关信号送入PLC进行处理。
由于机器人的启动信号需要将SNUSR1接口的25和50、24和49连个信号接通,为此使用PLC上COM1与Y0、COM2与Y4进行启动信号的给定。急停信号2和27由COM3和Y10来给定(正常时为高电平)。另外,视觉传感器的拍照信号通过Y20给定,相机光源通过Y21给定。具体接线见图9。
由于本设计全套设备使用TCP/IP协议通讯,为此还需在PLC上加挂一个以太网模块,本设计使用的是三菱FX3U-ENET-L以太网通讯模块。使用时,将模块的扩展接线口插入FX3U-80MRPLC的模块扩展口上,并且给模块上接上DC24V的供电电源,并在正面RJ45网线口上接一根网线到交换机。
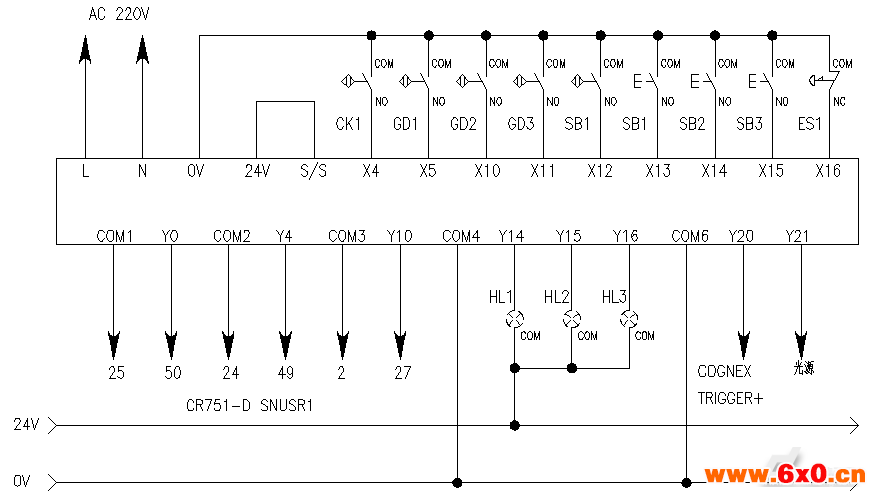
图9三菱FX3U-80MRPLC接线图
SolidWorks机械设计
利用SolidWorks软件进行仿真设计与模拟操作,再解决不同包装盒的自动拆解、自动压盖等机构的设计,然后设计原料的智能管理仓储机构等外部辅助设备。
(1)纸盒架设计
纸盒架为工业继电器最后存放的地方,共有2*6个位置,按照所选工业继电器的样子进行合理化设计,如图10所示。
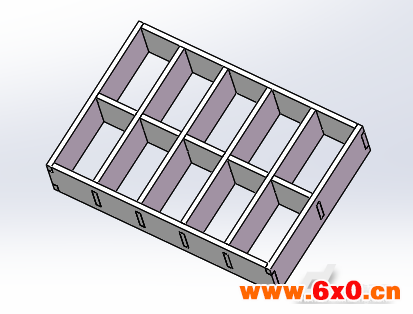
图10纸盒架设计
(2)原料管设计
原料管为工业继电器的存放区,通过伺服电机固定在滑台座上,将工业继电器依次从PVC管中按次推出,供机械手抓取。
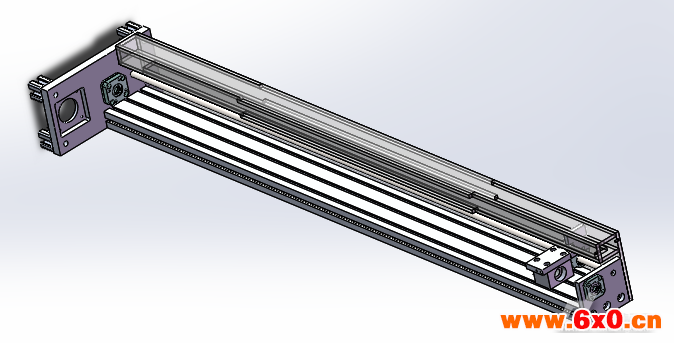
图11原料管设计
(3)机械手抓头
图12所示的机械手抓头是用来抓取工业继电器,并进行包装盒掀开、合上的综合机构,它包括抓头固定板、纸盒吸盘支架、继电器吸盘支架、气缸导杆、连接头、抓手挡块等。
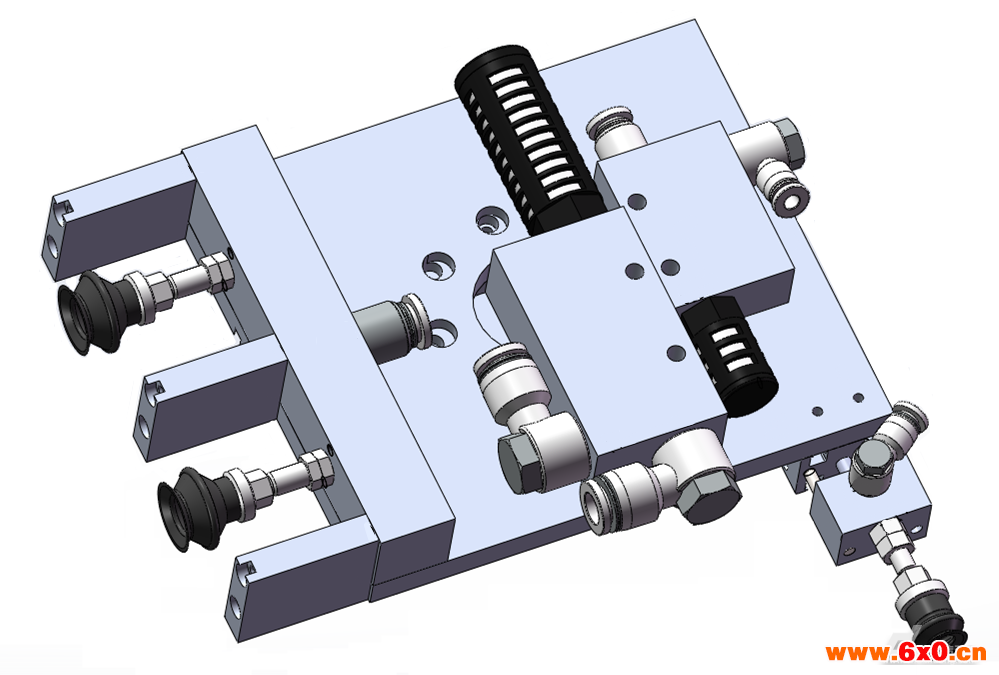
图12机械手抓头
(4)拆装工作台
在完成好纸盒架、原料管、机械手抓头等部件后,最重要的就是拆装工作台了,具体如图13所示。它包括拆装底板、气缸固定件、拆装光纤固定板、肋板、大盖旋转支架、翻叉、滑台固定板、夹耳、大盖压板等。
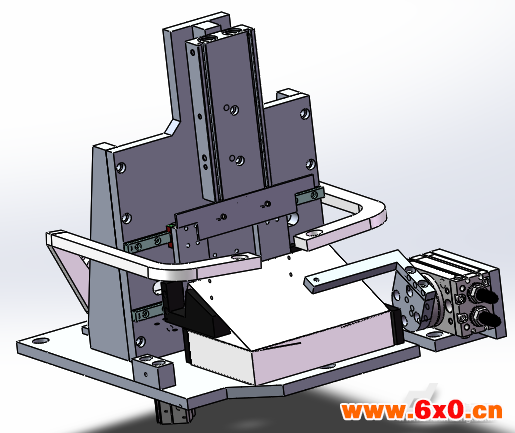
图13拆装工作台
结束语
在Solidworks仿真软件上测试各个机构,确认无误后进行实际加工及安装,配上三菱机器人和可编程逻辑控制器系统,就实现工业继电器智能化包装的功能需求。通过对夹具、机器人工作流程及动作的不断调整,最终实现智能化包装的最优化。
参考文献:
[1]三菱电机工业机器人CR750/CR751控制器操作说明书——功能和操作的详细说明[M].三菱电机(上海)有限公司
徐宁,男,1999-,浙江湖州人,大学专科,浙江工商职业技术学院在读,研究方向:工业机器人应用;








 QQ交流群
QQ交流群

