

依托于计算机、自动化技术的快速发展,工业机器人的性能不断提高,从最初应用于装配与物流搬运行业,到在机械加工、焊接、打磨抛光等高精度场合广泛运用。2013-2017年,我国机器人产业迎来高速发展期,产业规模开始不断扩大,平均增长率高达30%。根据中国电子学会发布的《中国机器人产业报告(2018)》显示,中国机器人市场规模达到84.7亿美元。
在工业机器人应用中,采用传统控制结构的伺服系统在高动态轨迹指令时会产生明显的机械振动,从而导致工业机器人定位精度与响应速度降低。长时间的振动会导致工业机器人减速机传递转矩过大而损坏轴系系统并降低使用寿命,更严重者甚至会直接使工业机器人报废。作为工业机器人动力输出的伺服系统,应具有较高的瞬时过载能力、跟踪精度、响应能力以及良好的通用性和扩展性。因此,降低振动现象是目前工业机器人关节伺服控制系统研究的一个重点问题。
学术界主要基于振动模型设计控制方法,通常会结合额外的状态反馈,其中包括减速机柔性转矩、工业机器人机械臂末端位置信息等。比例谐振控制就是通过将减速机的柔性转矩反馈到控制回路,等效于将系统的固有机械频率提高并远离系统的控制带宽,从而避免振动。滑模控制、模型预测控制也被研究者应用在机器人伺服控制中,但这些算法与传统的控制结构完全不同,且实现较为复杂,又对模型的准确性依赖较高,在实际中并没有得到推广应用。
目前,已在工程应用的方法主要是在原有的控制结构上加入低通滤波器、陷波滤波器等,通过设置合适的频率来抑制振动。加入低通滤波器往往会大幅降低系统的带宽,在一定程度上可以降低振动,但有时还会出现电机侧无振动机械臂杆却明显存在振动的现象。
陷波滤波器可以过滤掉指定频率的信号分量,设置准确的陷波频率,可以将伺服控制环内部由机械谐振特性造成的指令波动有效滤除,从而保证电机输出转矩无振动。然而工业机器人机械臂在空间内运动时,其每个关节上的等效惯量也在不停地变化,导致其谐振频率也随之变化,当陷波滤波器陷波频率与谐振频率不一致时,便无法有效抑制振动,甚至导致系统不稳定。
为了抑制低刚度机器人伺服系统出现的振动,清华大学电机工程与应用电子技术系的黄宣睿、宋宇洋、肖曦,清能德创电气技术(北京)有限公司的李秋生等,根据工业机器人单关节的弹性传动模型,基于内模控制原理提出一种工业机器人关节伺服系统振动抑制算法。有关研究成果已发布于2019年《电工技术学报》第3期,论文题目为“一种基于内模控制的工业机器人关节伺服系统振动抑制算法”。
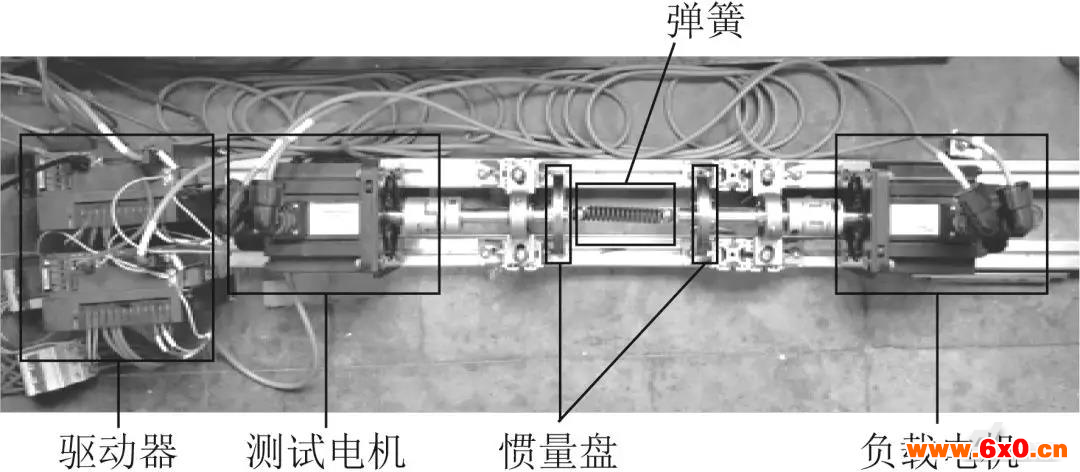
低刚度工业机器人关节等效测试平台
该算法通过在传统伺服控制器位置环与速度环之间添加抑振滤波器实现振动抑制,无需额外的传感器与复杂的控制算法,无需改变传统伺服控制器的基本控制结构,即可实现对振动的抑制。仿真与实验结果表明:该方法简单可行,能有效抑制低刚度机器人关节系统在定位时产生的振动,且具有较强的参数鲁棒性,易于在现有伺服控制系统中实现,具有工程可实用性。
据了解,内模控制是一种从化工过程控制中发展起来的控制方法,具有设计原理简单、鲁棒性好等优点,逐渐得到了国内外学者的关注。基于内模控制设计的控制器,往往具有传统反馈PI控制的结构,同时在此基础上增加一个控制环节,PI控制器用于调整系统的跟随性能,额外的控制环节用于增强系统的抗扰动性,因此还具有参数整定直观的优点。
声明:本文为转载类文章,如涉及版权问题,请及时联系我们删除(QQ:2737591964),不便之处,敬请谅解!








 QQ交流群
QQ交流群

