

移动机器人经过这几年的高速发展,已经是自动化行业众所周知的事情,这个行业的发展带来了导航方式的日新月异,导航产品反过来也极大的推动了该行业的发展。
自然导航又叫轮廓导航是最理想的导航状态,客户无需对外部环境做任何改造,移动机器人直接靠周围环境状况来导航。相对传统导航方式,无需人工添加额外标记物,组成简单,成本降低,安装和施工方便。
乔布斯曾说过,越简单总是越好,为机器人做减法的时候了,并且我们也做到了。NAV-LOC应运而生一切就是这么简单,我们也轻松一下,看下视频:

自然导航总共四步:
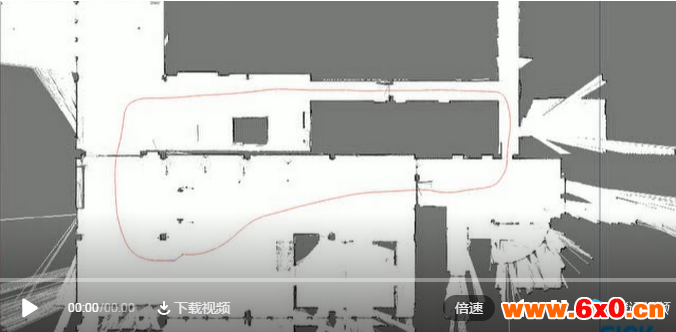
1激光雷达扫描环境,获得周边点云。

2运用点云数据,生成周边轮廓

3利用轮廓生成地图

4根据地图行进
NAV-LOC帮助客户轻松完成前三步工作,客户系统只需根据地图规划下路径即可轻松完成自然导航

此外,NAV-LOC具备强大的地图自学习功能当实际环境和早期创建地图有一定差异度时候,NAV-LOC自动学习环境并自动更新地图,一切都是这么简单。
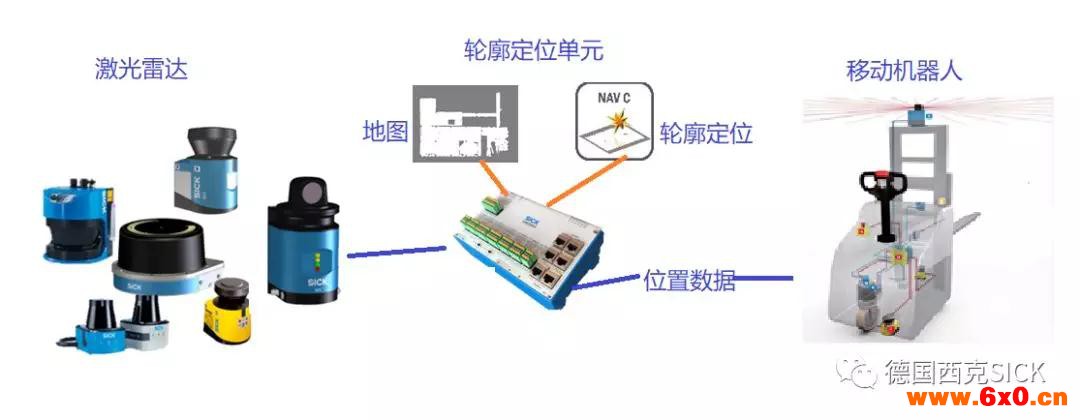
NAV-LOC家组及组成:
NAV-LOC是为自然导航而生的一套系统,不远的将来基本所有的数据输出型的雷达都可以引入该系统满足客户的各种应用场景,相信可以让客户的自然导航实现的更加“自然”
声明:本文内容由企业提供,如涉及版权、机密问题,请及时联系我们删除(QQ: 2737591964),不便之处,敬请谅解!








 QQ交流群
QQ交流群

