
自由度机器人关节间隙误差分析及仿真
通过6R机器人轨迹偏移分析,对机器人关节间隙进行建模仿真,重现了实际绘制轨迹偏移。确定迹偏移原因,指导机器人结构设计改进,提高机器人精度。 1 系统介绍 深圳市众为兴数控技术有限公司自主研发设计的MR601机器人,是一款集工业教学应用于一
标签: 2019-09-22六自由度机器人是一种典型的工业机器人,在自动搬运、装配、焊接、喷涂等工业现场中有广泛的应用。固高科技GRB系列六自由度机器人是固高成熟完备的运动控制技术与先进的设计和教学理念有机结合的产物,既满足工业现场要求,也是教学、科研机构进行运动规划
标签: 2019-10-08行星变速器由几个NGW型周转轮系和若干换档操纵元件(制动器B、离合器C)组成,依靠与齿轮或轴联接的离合器、制动器的分离或结合实现换挡,广泛用作汽车、工程机械的变速传动装置。如果不借鉴现有设计,一般工程技术人员很难根据所需档位数和传动比数值设
标签: 2019-10-06摘 要:针对七自由度机械臂远程控制的需要,构建了基于TCP/IP网络的控制系统。首先通过设计单片机系统实现本地端控制,然后运用WinSockets类创建基于TCP/IP的远程控制程序,使连接在Internet网络上的任意客户端均可实现对机械
标签: 2019-09-25摘 要:为了克服现有抄片机手工操作引起的种种产品缺陷,采用模块化、集成化、逻辑分析等方法,针对特殊使用要求设计了一种应用在高性能纸基摩擦材料抄片工艺上的气动机械手,包括机械手硬件结构、动作流程以及气动控制回路。采用AS-i总线整合机械手传感
标签: 2019-09-25摘 要:本文提出了一种少自由度工业机器人构型综合的理论方法。首先,根据给定的工作要求,研究分析期望机构的自由度类型。然后,通过分析约束螺旋系与几何条件,得到机构中运动副螺旋与约束螺旋系的关系。最后,结合构型约束的几何条件并考虑机构控制等方面
标签: 2019-09-22
通过6R机器人轨迹偏移分析,对机器人关节间隙进行建模仿真,重现了实际绘制轨迹偏移。确定迹偏移原因,指导机器人结构设计改进,提高机器人精度。 1 系统介绍 深圳市众为兴数控技术有限公司自主研发设计的MR601机器人,是一款集工业教学应用于一
标签: 2019-09-22
随着物流、食品和石化等行业的不断发展,码垛机器人发挥着越来越重要的作用,它不仅可以准确、高效地完成码垛作业,而且可以降低工人的劳动强度,提高生产效率。 目前,国外主要机器人厂家,如ABB、FANUC等,均有较为完善的码垛机器人产品系列,垄断
标签: 2019-09-22
六自由度焊接机器人是上海高威科电气技术有限公司与奇瑞汽车股份有限公司台作开发的工业用机器人,它是国家863计划项目及工信部重大专项的部分。奇瑞六自由度焊接机器人拥有强度大、刚性好重复定位精度高、工作半径大及易拓展易维护等诸多优点,配台智能视
标签: 2019-09-22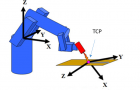
随着机器人变得日益成熟,它们已经能够应用到处理越来越多的工业工序。6自由度(6Dof)机器人能够执行复杂的动作,因而可以在许多复杂的工业任务当中展示良好的性能,比如码垛、搬运、涂胶和焊接等。6自由度机器人可以提举和灵活地操纵重型载荷,并通过
标签: 2019-09-22
随着机器人产业的飞速发展,工业机器人已经广泛应用于各行各业,从材料搬运到机器维护,从焊接到切割,从装配到喷涂,我们发现,这些工业机器人形状各异,功能性能各不相同,那么是什么决定了工业机器人的灵活性和活动范围呢,这个问题比较复杂,但是有一个关
标签: 2019-09-22
抛光是零件加工的最后一个环节,材料去除量很少,抛光有电化学抛光、磁流变抛光、等离子抛光、超声波研磨抛光和机械抛光等,而机械抛光的效率最高且可控性好,本文提出基于并联机器人技术的自动抛光机床系统设计方案并研制样机,进行了抛光实验。 本文提出基
标签: 2019-09-22

 QQ交流群
QQ交流群

