
如何更高效地掌握步进电机的控制算法
在对基于步进电机的运动控制系统设计进行优化的过程中,工程师必须综合考虑成本、性能、效率、未预料到的反馈难题(如机械共振)以及开发时间等因素。现代的电机控制系统面临着在多种不利环境中工作的难题,而传统解决方案的总效率通常受限于整个系统所遇到的
标签: 2019-09-26钢板防护罩自研发生产至今,随着机床化的需求其工艺一直被不断的改进,但*不变的是钢板钢板防护罩的退节算法,这是影响防护罩伸缩自如和无噪音的主要因素,因此正确的退节算法才能使护罩运行自如,无卡节现象。下面就将退节的算法简单介绍如下: 1:
标签: 2019-09-29随着数控铣床,车床,钻床已被普遍的应用的机械加工行业,相应机械设备自动化发展的步伐,链板排屑机是必不可少的铁屑输送设备。为了使链板排屑机达到更好的排屑效果,排屑机的提升角度要恰到自然,极为关键。下面就排屑机提升角度的算法做一下简单介绍:
标签: 2019-09-29摘要:在传统PID控制器的基础上,基于神经元的自学习特性,提出了适用于数控机床住置伺服控制的神经元控制器。该算法的特点是不需要系统建模,结构简单,控制参数实时自适应调节、运算简单、适用于工程实际应用。仿真和数控机床伺服系统的实时控制实验表明
标签: 2019-09-28
在对基于步进电机的运动控制系统设计进行优化的过程中,工程师必须综合考虑成本、性能、效率、未预料到的反馈难题(如机械共振)以及开发时间等因素。现代的电机控制系统面临着在多种不利环境中工作的难题,而传统解决方案的总效率通常受限于整个系统所遇到的
标签: 2019-09-26
随着工业技术的发展,在航空、军事、机械制造领域等需要多个电机同时驱动一个或多个工作部件进行协调控制的场合越来越多。传统的控制系统多采用单一电机实现单轴控制,电机的输出转矩有一定的限制,当传动系统需要较大的驱动功率时,必须特制功率与之相匹配的
标签: 2019-09-26
步进电机是将电脉冲信号转变为角位移或线位移的开环控制电机,是现代数字程序控制系统中的主要执行元件,应用极为广泛。在非超载的情况下,电机的转速、停止的位置只取决于脉冲信号的频率和脉冲数,而不受负载变化的影响,当步进驱动器接收到一个脉冲信号,它
标签: 2019-09-26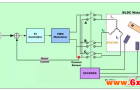
无刷电机属于自換流型(自我方向轉換),因此控制起来更加复杂。 BLDC电机控制要求了解电机进行整流转向的转子位置和机制。对于闭环速度控制,有两个附加要求,即对于转子速度/或电机电流以及PWM信号进行测量,以控制电机速度功率。 BLDC电机可
标签: 2019-09-26摘要:针对SCARA机器人在水平面内躲避障碍物的轨迹规划问题,基于几何学与人工智能学理论,提出一种智能控制算法,用于生成SCARA机器人避障路径上的关节坐标值序列。仿真结果表明,该控制算法能快速有效地实现SCARA机器人在X-Y平面内的二维
标签: 2019-09-22摘 要:本文介绍了利用可编程序控制器(PLC)实现的远程液位自动控制系统,详细论述了智能PID算法的控制规则,给出了由PLC完成其控制策略的硬件配置和软件实现方法。Abstract:This paper presents a remote
标签: 2019-09-22北京交通大学电气工程学院的研究人员王聪、刘明光等,在2018年第9期《电气技术》杂志上撰文指出,随着电力系统自动化程度的不断提高,智能视频监控在电力系统中的应用也变得越来越多。 本文针对智能视频监控系统所采用的动态目标检测与识别算法进行了综
标签: 2019-09-22摘要:针对SCARA机器人末端在做直线运动时难以判定是否到达极限位置的问题,提出一种基于几何学的求解算法,用于精确计算出任意末端位置与可变工作空间条件下的直线运动极限点位置坐标值。并分别在左、右手系下通过MATLAB理论仿真与VC实际开发相
标签: 2019-09-22
摘 要:针对移动机器人运用快速扩展树(RRT)算法进行路径规划,随机性大的问题,提出了一种目标引力式的RRT路径规划算法。该算法在RRT算法的基础上,引入了一个目标引力函数,促使扩展随机树朝目标点方向生长。仿真结果表明,该算法提高了复杂环境
标签: 2019-09-22
机械手臂作为自动化设备中的一个重要组成部分,以其操作灵活性,被广泛应用于工业生产、医疗服务、军事科技等各个方面。对于不同的工作工作环境,我们要对机械手臂的各个关节进行具体的轨迹规划,从而得到机械手臂末端的位姿,因此,对机械手臂进行精确快速的
标签: 2019-09-22

 QQ交流群
QQ交流群

