
面向MBD的数控加工工艺三维工序模型技术分析
【中国机床商务网】导读:MBD(ModelBasedDefinition,基于模型的定义)是一个用集成的三维模型来完整表达产品定义信息的方法,它以三维标注技术[1]为基础,详细规定了三维模型中产品尺寸、公差等的标注规则和工艺信息的表达方法[
标签: 2019-09-30CWO装配形式一实体模型 CWO装配形式二实体模型CWO装配形式三实体模型如初次打开请耐心等待安装浏览插件若安装不成功请点击下载eDrawings2007浏览插件
标签: 2019-10-01CWU装配形式一实体模型 CWU装配形式二实体模型 CWU装配形式三实体模型如初次浏览请耐心等待安装浏览插件若安装不成功请点击下载eDrawings2007浏览插件
标签: 2019-10-011 引言精密丝杠是精密机床、数控机床及其它精密机械与仪器的重要传动装置。为起到将旋转运动转换为直线运动的传动作用,对精密丝杠的精度、刚度、耐磨性等均提出了较高要求。为减小残余应力的影响,丝杠毛坯须经球化退火处理,以获得稳定的球状珠光体组织;
标签: 2019-09-30【中国机床商务网】导读:近年来,中国紧固件行业备受全球业界关注。中国紧固件在全球经济一体化的大好形势下,如何更好地开展行业工作,任重道远。如何加快发展步伐,也就是说中国紧固件企业有机会抓住市场的调整时期,提升我们的产品档次,加强我们的产品开
标签: 2019-09-30
【中国机床商务网】导读:MBD(ModelBasedDefinition,基于模型的定义)是一个用集成的三维模型来完整表达产品定义信息的方法,它以三维标注技术[1]为基础,详细规定了三维模型中产品尺寸、公差等的标注规则和工艺信息的表达方法[
标签: 2019-09-30摘要:本文介绍了双切齿轮滚刀结构的特点和设计方法,阐述了运用Solidworks软件对双切齿轮滚刀进行建模的方法和步骤,并列举了几个双切齿轮滚刀模型的应用方法。 双切齿轮滚刀是一种的切齿刀具,主要应用于能源、船舶及矿石等大模数齿轮的加工。
标签: 2019-09-29摘要:为实现超精密机床的高速高精度跟踪,提出了一种利用未来信息的有限带宽期望模型。该模型的幅频特性在期望频段内为1,其它频段内为0,在所有频段内相位滞后恒为零。系统设计中,采用了反馈+前馈补偿形式的控制器近似实现该模型。将该控制器应用于实际
标签: 2019-09-28摘 要:阐述了一种基于数控机床切削加工过程的模型参考自适应控制方法。通过MATLAB/SIMULINK分别仿真了闭环、开环和模型参考自适应控制3种情况下的机床切削加工过程模型。仿真结果表明:模型参考自适应控制方法比其它两种方法更能根据机床变
标签: 2019-09-28
中国稀土资源探明储量占全球的36.52%,是全球第一大稀土资源大国。中国长期大量出口稀土,现在中国用36.4%的储量承担着全球90%以上的稀土供应,为世界稀土市场的供应和稳定作出了巨大贡献。我国是名副其实的世界第一大稀土资源国,已探明的稀土
标签: 2019-09-26
基于电机控制系统模型的设计价值 旨在帮助简化使用传统非自动化方法进行控制系统设计时所遭遇的固有困难与复杂性。 为设计人员提供可视化设计环境,让开发人员为整个系统使用单一模型,实现数据分析、模型可视化、测试、验证和最终的产品部署。一旦模型完成
标签: 2019-09-26摘 要:从复杂系统的行为出发,对复杂机械系统状态预测的可行性进行研究,指出对复杂机械系统进行短期预测是可行的,并且提出了基于混沌的复杂机械系统状态预测思想。基于机械系统状态的各种信号数据序列的相空间构造方法,研究确定了复杂系统状态的最大预测
标签: 2019-09-25摘 要: 隐Markov树(HMT)模型作为一种信号小波变换系数的统计模型较好地刻画了小波变换系数的统计相关性和非高斯性。应用HMT模型进行故障诊断时,一个重要的问题即是HMT模型结构的选择。判别信息准则(DIC)是一种适合于分类问题的模型
标签: 2019-09-25
情感识别有助于为人机交互提供良好的体验,是未来计算机必备的一项重要能力,因而近年来语音情感识别已经逐渐成为一个研究热点,并有了大量应用。虽然早在20世纪80年代就出现了语音情感识别的相关研究,该课题对于机器而言确实较为棘手。此外,相比语音识
标签: 2019-09-25摘 要:为了保障城市轨道交通的安全,对腐蚀轨道附近建筑中钢筋的杂散电流的检测和防护已成为必然。复杂的环境使杂散电流难于直接检测,为此本文深入杂散电流腐蚀的机理,运用电路理论推导杂散电流分布的理论公式,建立离散的供电理论模型。根据杂散电流的分
标签: 2019-09-23采用集中参数法建立RV减速机的5自由度纯扭转动力学模型,计算出其一阶固有频率,分析出其关键的影响因素为曲柄轴两端轴承的刚度。最后通过试验验证了模型的有效性
标签: 2019-09-23在印刷机的纠偏控制中,多以调节PID控制器的参数为研究方向,使印刷机的性能良好。自抗扰控制器的特性是控制对象的模型未知时,仍能够实现较为精确的扰动补偿。本文从印机物理结构以及印刷工艺出发,给出了部分推导无主轴凹版印刷机模型步骤以及完整思路。
标签: 2019-09-22如何在模型未知时实现对机器人的控制这一问题的研究对机器人理论的发展和机器人控制理论在实践中的应用都具有重要的意义。本文提出一种基于神经网络机器人模型辨识的迭代学习智能控制方法。仿真表明该方法具有满意的效果。 作为在现代控制理论鼎盛时期问世的
标签: 2019-09-22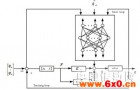
焊接机械手的轨迹跟踪是焊接机器人控制的难点。机械手是一个典型的非线性动力系统,具有大惯性和大延迟。目前对机械手的控制,主要采用传统PID控制。由于系统复杂性较高,设计人员为建立系统模型做出各种假设和简化,因此数学模型的控制精度会受到很大的影
标签: 2019-09-22
多年以来,对机械手进行动力学建模是学术圈当中的一个已知方法。它通常被用作机器人和工程实验室的一个工具,用于研发仿真机器人与高级控制算法、运动模拟以及其他学术追求。动力学建模涉及数学公式的开发,用于描述机器人的动态特性,比如惯性、质量、重心以
标签: 2019-09-22
摘要:为了实现SCARA机器人的高速高精度控制,将带偏心负载的SCARA机器人简化成三连杆机构,并建立机构的惯性力模型,进行辨识计算出机器人各惯性项系数的值,建立基于惯性力模型的加速度自适应控制方法,自适应计算关节一理论最大运动角加速度。通
标签: 2019-09-22

 QQ交流群
QQ交流群

