
In-Sight智能相机高效解决大输液产品标签的快速检测问题
山东科伦药业有限公司(下简称科伦药业)主要从事大容量注射剂的生产制造,年产大输液30000万瓶。为保证100%的产品合格率,科伦药业执行一套复杂的检测流程,涵盖灯检、标签检测、包装、库存等环节。 在生产线的输液瓶标签检测环节,之前全部是人工
标签: 2019-09-22
山东科伦药业有限公司(下简称科伦药业)主要从事大容量注射剂的生产制造,年产大输液30000万瓶。为保证100%的产品合格率,科伦药业执行一套复杂的检测流程,涵盖灯检、标签检测、包装、库存等环节。 在生产线的输液瓶标签检测环节,之前全部是人工
标签: 2019-09-22
背景 安瓿瓶(ampoule/ampule)是用于盛装药液的小型玻璃容器,容量一般为1~25ml,常用于注射用药液。在生产中安瓿瓶的瓶口是由明火高温熔封的,所以有封口不完整,容易碎裂的问题。同样,瓶颈处也容易碎裂,导致药液流出的问题。
标签: 2019-09-22
国家电网公司(以下简称国网)是中国最大的电网企业,由于各地的数字电表都要由国网测试以后统一分配安装,因为数量巨大,急需自动化的检测设备来提高生产效率。 在以前的电表检测过程中,需要有专门人员去手动切换画面,来观察每个画面显示的字符是否正确。
标签: 2019-09-22
PET瓶是现代生活中随处可见的物品,矿泉水、饮料、酒、牛奶、药品……需求量简直大的惊人。 在PET瓶的生产中,以吹瓶机为代表的机械设备拥有非常大的生产能力,一个工作日可生产数万甚至十余万只。显然,只有如此快的生产速度,才能够满足市场的需求
标签: 2019-09-22车流量检测一直是交通领域比较关注的项目,既可以保障道路行驶安全,也可以达到宏观调控的目的。上篇我们说到,如今已经是智能交通时代了,也介绍了基于机器视觉的车牌识别技术的优势。同时,机器视觉车流量检测技术是我国实现智能交通的最好体现,在整个交通
标签: 2019-09-22
模具行业是一个传统、复杂、充满竞争的行业。企业每天都被紧张的工期、高精度的质量要求和频繁的人员流动所困扰。虽然自动化检测技术在各行各业都有建设成果,但是在模具表面缺陷的视觉检测方面,还鲜有人对其做过专项攻关,因为大部分涉及到铸造的工艺,往往
标签: 2019-09-22
玻纤细纱经过捻纱机后,形成一个个的管纱,管纱需要经过去皮,测量Tex,外观检测,称重,包装等环节,才能够出厂。人工检测易受到主观因素影响,造成人力、物力的极大浪费。西安获德结合多年在玻纤行业视觉检测经验,对管纱外观质量做了专业的成像检测方案
标签: 2019-09-22
汽车自诞生之日起,便一直为提高其乘坐舒适性以及便捷性而努力。而车门作为乘员上下车辆的一个必经之“地”,其也受到极高的重视。而如何更好的开闭车门则是一个大课题。随着汽车技术不断的发展,诞生了车门限位器。 车门限位器(Door check)的作
标签: 2019-09-22北京交通大学电气工程学院的研究人员王聪、刘明光等,在2018年第9期《电气技术》杂志上撰文指出,随着电力系统自动化程度的不断提高,智能视频监控在电力系统中的应用也变得越来越多。 本文针对智能视频监控系统所采用的动态目标检测与识别算法进行了综
标签: 2019-09-22
摘要:人工智能技术在制造过程诊断中的应用价值正逐渐凸显,尤其是在冲压件质量检测及工艺优化方面正发挥着人工无法比拟的优势。 “物理世界”(以制造业设备为代表)和“数字世界”(由人工智能、传感器等技术代表)的碰撞催生了制造业的巨大的转变,两个世
标签: 2019-09-22
手机外观缺陷检测一直是业界的难题,需要检测的缺陷种类繁多且变化多端,主要缺陷包括手机外壳上出现的污点、划痕、边缘缺失、裂纹、水迹水印、气泡、手指纹、异物、油墨、异色区分等问题。 目前,手机整机外观全检基本上处于全人工肉眼检测的状态。由于手机
标签: 2019-09-22一 直角坐标机器人的定义及主要特点机器人按ISO 8373定义为:位置可以固定或移动,能够实现自动控制、可重复编程、多功能多用处、末端操作器的位置要在3个或3个以上自由度内可编程的工业自动化设备。这里自由度就是指可运动或转动的轴。直角坐标机
标签: 2019-09-22一 直角坐标机器人介绍 机器人按ISO 8373定义为:位置可以固定或移动,能够实现自动控制、可重复编程、多功能多用处、末端操作器的位置要在3个或3个以上自由度内可编程的工业自动化设备。这里自由度就是指可运动或转动的轴。直角坐标机器人是以直
标签: 2019-09-22摘要:本设计是一种具有稳定的牵引力的X—Y移动的复合管道焊缝检测机器人。 以DSP为核心开发基于机器视觉的嵌入式实时系统,用于完成高性能的管道焊缝的实时自动定位和检测任务;介绍了机器人系统的工作原理,系统结构;阐述了系统的焊缝识别算法和C
标签: 2019-09-22
行人检测任务的目标是在图像中检测行人并确定行人的位置。随着人工智能技术的发展,越来越多的研究人员关注这项任务并且做了很多相关的研究工作。准确的行人检测方法可以应用于很多领域,例如智能辅助驾驶,智能视频监控和智能机器人等。 近年来,区域卷积
标签: 2019-09-22
近年来,随着工业自动化的快速发展,机器人在工业领域的应用越来越广泛,在搬运、装配等应用中,导轨机器人已成为了一种提高机器人使用率的方式,导轨机器人、单导轨多机器人的使用也越来越广泛。由此也引发了多台机器人在同一导轨上工作时的安全性问题,当前
标签: 2019-09-22
在实际生活中机器人需要与环境进行交互以执行多种任务,而每个任务都需要进行合理的定位。一种简单的定位检测方法是标注一个图像功能区域数据集,利用这个数据集训练一个深度分类模型,通过模型检测图像中所有可能的潜在功能区域。然而,标注一个这样的大规模
标签: 2019-09-22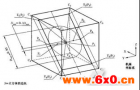
摘要按照ISO8373的定义,工业机器人是指位置可以固定或移动,能够实现自动控制、可重复编程、多功能用途、末端操作器的位置要在3个或3个以上自由度内,可编程的工业自动化设备。 按照ISO8373的定义,工业机器人是指位置可以固定或移动,能够
标签: 2019-09-22
随着生产制造技术和产品的快速发展,3C电子产品的制作周期不断变短,用户体验和要求越来越高,制造环节中的人工成本也越来越高。为了强力管控产品质量、提高生产效率,电子产品出货前的功能性能测试是出厂前必不可少的环节,但目前工厂测试都是依靠人工作业
标签: 2019-09-22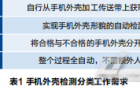
在移动互联网时代,手机与人们的生活联系得越来越紧密,手机的需求量也在不断增长。本工作站的目标正是完成对手机外壳的检测分类工作,这在手机的生产制造中是一道十分重要的工序。手机外壳的检测分类工作主要需求如下表: 系统方案设计 为了实现上述对手
标签: 2019-09-22

 QQ交流群
QQ交流群

