
经济型数显式推拉力计重力加速度值可设定
经济型数显式推拉力计型号:UJN01/HG-1000 货号:ZH4269产品简介:一、产品用途 UJN01/HG系列数显式推拉力计是通用型便携式推拉负荷测试仪器,适用于各种产品的推拉力负荷测试,插拔力测试、破坏试验等,并可结合各种机台和夹具
标签: 2019-10-09
经济型数显式推拉力计型号:UJN01/HG-1000 货号:ZH4269产品简介:一、产品用途 UJN01/HG系列数显式推拉力计是通用型便携式推拉负荷测试仪器,适用于各种产品的推拉力负荷测试,插拔力测试、破坏试验等,并可结合各种机台和夹具
标签: 2019-10-09
振动温度变送器(速度加速度)一体化振动温度变送器防爆等级ExiaII BT6 Ga,通过PT100铂电阻采集温度,输出4-20mA电流信号,振动量的采集是通过压电式传感器,采用进口检波器,抗干扰能力强,满量程线性一致高。输出4-20mA电流
标签: 2019-10-09压电式加速度传感器(IEPE)特点: 三向输出,可同时测量X、Y、Z 方向 内装IEPE前置放大器 通孔安装主要技术指标:动态特性测量范围(峰值)±100g轴向灵敏度(25℃) ±5%50mV/g(160H
标签: 2019-10-09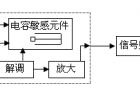
加速度传感器标准输出加速度传感器为电流型振动传感器,主要用于工业旋转机械的轴承振动,应用范围1、设备振动测量:YD30系列集成加速度传感器广泛应用于各行业设备运行状态监测。设备运行时的振动量是估量设备运行是否正常的重要指标。该传感器可以测量
标签: 2019-10-09VB-Z9500AN压电式加速度传感器一、概述:VB-Z9500AN系列加速度传感器是在一片多晶硅上通过微机械加工出加速度敏感元件,及转换、测量、放大电路组成,因此它属于集成传感器。它可测量从直流到高2.5kHz的±1g~&p
标签: 2019-10-09IEPE压电加速度传感器共同指标:• 恒流源供电:2~20mA, 典型值:4mA(信号调理器供电电压范围:18~30VDC, 典型值:24VDC)• 线性≤1%• 横向灵敏度≤5%,典型值≤3
标签: 2019-10-09德国ME AS系列加速度传感器是一种能够测量加速度的传感器。通常由质量块、阻尼器、弹性元件、敏感元件和适调电路等部分组成。传感器在加速过程中,通过对质量块所受惯性力的测量,利用牛顿第二定律获得加速度值。德国ME测量系统使用DMS技术制造加速
标签: 2019-10-09航模可以像真的飞机一样飞上天空,深受人们的喜爱。越来越多的人喜爱航模这项活动,我国的航模事业也在蓬勃发展。航模需要的传感器多种多样,为了更好、更方便控制航模的飞行,主要靠的是加速度传感器和压力传感器。其中加速度传感器的两个轴测量航模垂直地面
标签: 2019-10-08压电式加速度传感器原理和特点压电式传感器是利用弹簧质量系统原理。敏感芯体质量受振动加速度作用后产生一个与加速度成正比的力,压电材料受此力作用后沿其表面形成与这一力成正比的电荷信号。压电式加速度传感器具有动态范围大、频率范围宽、坚固耐用、受外
标签: 2019-10-06加速度传感器输出接头形式M5(M6)接头是加速度传感器最为常用的输出接头形式。M5接头特点是尺寸较小,一般配用直径较细的电缆(2mm或3mm),比较适合振动实验的测试。另外M5(M6)的结构型式对信号屏蔽较好,所以对电荷输出型加速度传感器因
标签: 2019-10-06由于传统的“旋转电动机+滚珠丝杠”伺服进给方式难以满足加工精度和速度要求,因而,直线电机的精密进给加工方式开始出现。虽然直线电机在机械结构方面得到大大简化,没有中间传动环节,伺服系统的刚性得到很大提高,由于中间传动环节所带来的误差也得到了较
标签: 2019-10-06加速度计是直接安装在振动物体表面(或内部)的小型设备。它们包含一个小块,由像弹簧一样操作的柔性部件悬挂。当加速度计移动时,小质量将成比例地偏转加速度。 可以使用各种传感技术来测量质量的偏转量。由于质量和弹簧力是已知的,挠曲量很容易转换成加
标签: 2019-10-04加速度传感器在我们日常生活中并不常见,但是在工业上应用非常广泛,比如航天,交通等机器上,可以说基本离不开加速度传感器,其作用也是非常的明显,特别是对自动化的设备,更是离不开加速度传感器。 加速度传感器的应用 1、游戏控制 加速度传感器
标签: 2019-10-04
受控加速度跌落试验机主要功能是评估产品在实际使用时客户可能意外将产品跌落后对产品性的影响; 适用标准:JISC0044IEC60068-2-32 产品特点: 1.双立柱直线轴承导向,伺服电机+同步带驱动升降,可任意设定测试高度,且定位准确
标签: 2019-10-04摘 要:提出了一种新型微加速度开关的结构及工作原理,并对该机构的抗高过载能力进行了分析,得出了满足高过载条件的尺寸参数设计公式,建立了该机构的参数化数学模型。根据数学模型进行了该机构的系统级建模与仿真,得出了位移与时间的关系曲线。仿真结果表
标签: 2019-09-25
现今的很多设备,都有高速度、高加速度运的要求,例如存储及输送系统中,速度达到7米/秒的情况并不少见,改进的易格斯Guidelok拖链系统甚至能用在更快速应用中。 ► 速度高达7米/秒、加速度10 m/s2。 ►可减少80 %导向槽安装空间
标签: 2019-09-25
摘要:为了实现SCARA机器人的高速高精度控制,将带偏心负载的SCARA机器人简化成三连杆机构,并建立机构的惯性力模型,进行辨识计算出机器人各惯性项系数的值,建立基于惯性力模型的加速度自适应控制方法,自适应计算关节一理论最大运动角加速度。通
标签: 2019-09-22

 QQ交流群
QQ交流群

