
带你了解工业机器人的关节:精密减速机
现今工业机器人的先进程度让人叹为观止,尤其是那些灵动的5轴6轴机器人,具有如此多的关节,还能够做到运动和指令的精确传输,各部位紧密配合完成复杂的工作,让人不禁好奇它们的传动系统到底是怎样的,关节到底是什么结构的呢? 比如这个 ▼ 日本安川
标签: 2019-09-251气动膝关节的总体结构气动膝关节由个连杆机构和阻尼气缸组成1.根据人体膝关节的转动范围小于180的要求,连杆机构可采用双摇杆结构,为保证模拟人体站立时承重的稳定性,应对摇杆的转动方向加以限制,只能从限制点开始,顺时针方向转动和逆时针方向返,
标签: 2019-10-06据行业专家及协会资料调研,在全球范围内,机器人行业应用的精密减速机可分为RV减速机、谐波减速机和SPINEA减速机,三者的市场销售数量占比约为40%、40%、20%。其中,RV减速器和谐波减速器是工业机器人最主流的精密减速器。 RV减速器:
标签: 2019-09-26
现今工业机器人的先进程度让人叹为观止,尤其是那些灵动的5轴6轴机器人,具有如此多的关节,还能够做到运动和指令的精确传输,各部位紧密配合完成复杂的工作,让人不禁好奇它们的传动系统到底是怎样的,关节到底是什么结构的呢? 比如这个 ▼ 日本安川
标签: 2019-09-25从上面的机器人臂部结构图中我们可以看到,在机器人关节处都安装有电机和减速机用来控制关节运动,那么问题来了: 在机器人系统中,为什么不能直接控制伺服电机转子转速控制关节运动,为何还需要减速器? 要回答这个问题,首先要明确工业机器人关节的工况:
标签: 2019-09-25
【减速器如何替代电机转速来控制机器人关节运动】在机器人系统中,为什么不能直接控制伺服电机转子转速控制关节运动,为何还需要减速器?要回答这个问题,首先要明确工业机器人关节的工况 从上面的机器人臂部结构图中我们可以看到,在机器人关节处都安装有
标签: 2019-09-25摘 要:利用可编程控制器(PLC)控制系统的高可靠性、编程及维护方便、体积小的特点,将其应用于环流可逆调速系统中,研制出基于PLC的工业机器人关节直流伺服系统,通过环流可逆调速系统控制电机的正反转,实现对工业机器人关节的伺服控制。其优点是在
标签: 2019-09-22
通过6R机器人轨迹偏移分析,对机器人关节间隙进行建模仿真,重现了实际绘制轨迹偏移。确定迹偏移原因,指导机器人结构设计改进,提高机器人精度。 1 系统介绍 深圳市众为兴数控技术有限公司自主研发设计的MR601机器人,是一款集工业教学应用于一
标签: 2019-09-22摘要:本文主要介绍直角坐标机器人和关节机器人的特性,以及两种机器人的应用对比。关键字:直角坐标机器人 关节机器人前言:现今工业机器人主要分两大类——直角坐标机器人和关节机器人,这两类机器人均适合用于诸多工业领域的机械自动化作业,比如,自动装
标签: 2019-09-22直角坐标机器人被广泛应用于各种自动化生产线中完成码垛搬运、上下料、供料、装配、检测、焊接和涂胶等任务。它以行程大,负载能力强,精度高,组合方便,性价比非常高,易编程,易维护等优点而深受各个行业专家和操作者的称赞。但在完成一些需要进入小空间的
标签: 2019-09-22
机器人的传动和布局设计从理论上讲应该是比较成熟的领域,如果有样机,拆开一看就可以知道大部分的结构。但是在结构优化设计经验、装配规范的标准化、零配件的按需定制以及供应链优化等方面国内厂商还需要很长时间的积累。 本文以KUKA为例,分协作机器人
标签: 2019-09-22
机械手臂作为自动化设备中的一个重要组成部分,以其操作灵活性,被广泛应用于工业生产、医疗服务、军事科技等各个方面。对于不同的工作工作环境,我们要对机械手臂的各个关节进行具体的轨迹规划,从而得到机械手臂末端的位姿,因此,对机械手臂进行精确快速的
标签: 2019-09-22
柔多关节工业机器人从传动角度可以另述为4到6关节工业手臂。作为人类手臂的延伸,广泛用于搬运,打磨,焊接,冲压等工作。多关机工业机器人可以单独工作,也可以多台协调工作。其可以作为生产机械的主体单独完成任务,也可以配合机床,塑胶机械,自动化生产
标签: 2019-09-22
机器人电动伺服驱动系统是利用各种电动机产生的力矩和力,直接或间接地驱动机器人本体以获得机器人的各种运动的执行机构。 对工业机器人关节驱动的电动机,要求有最大功率质量比和扭矩惯量比、高起动转矩、低惯量和较宽广且平滑的调速范围。特别是像机器人末
标签: 2019-09-22
【KUKA结构——工业机器人末端关节结构图】机器人的传动和布局设计从理论上讲应该是比较成熟的领域,如果有样机,拆开一看就可以知道大部分的结构。但是在结构优化设计经验、装配规范的标准化、零配件的按需定制以及供应链优化等方面国内厂商还需要很长时
标签: 2019-09-22很多机加工企业都知道,在机床上下料应用过程中,有很多方案,其中,应用关节式机器人、桁架式上下料机械手都是可以实现的。那么两者在应用上有些什么差别呢?改怎么去判断呢?对桁架式机械手与关节式工业机器人从应用布局,人机管理,效率,成本四个大的方面
标签: 2019-09-22
前言:六关节型机器人,又称之为“六自由度型机器人”。是我们大型工业生产中,使用相当广泛的一种机器人。其基本结构为由六个转轴,组成的空间六杆开链结构机器人。由七个部件和六个关节连结而成的,拥有六个自由度,每个自由度均为旋转关节,具有与外界交互
标签: 2019-09-22当设计一个涉及移动物体或者某种重复性运动功能的自动化项目时,机器人的加入会使这个项目获益,选择正确的机器人类型会降低设计成本和提高成功率。简单的应用程序只会使用一组重复不变的编程运动,而增添机器视觉系统,或者增加与机器人控制系统连接的一组现
标签: 2019-09-22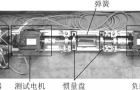
依托于计算机、自动化技术的快速发展,工业机器人的性能不断提高,从最初应用于装配与物流搬运行业,到在机械加工、焊接、打磨抛光等高精度场合广泛运用。2013-2017年,我国机器人产业迎来高速发展期,产业规模开始不断扩大,平均增长率高达30%。
标签: 2019-09-21
日本近畿大学医院4月10日发布消息称,他们在日本国内首次引进了辅助受损膝关节换为人工关节手术的最新型海外产机器人。9日,该医院用辅助机器人为一名50多岁男性患者进行了手术。据日本共同社4月11日报道,对象为因年龄增长的关节病、风湿病造成膝部
标签: 2019-09-21滑动接触表面为球面,由一个外球面的内圈和一个风球面的外圈组成,主要适用于摆动过动、倾斜运动和低速旋转运动的滑动轴承。滑动轴承是只产生滑动摩擦的轴承。关节轴承属滑动轴承范畴,但民界各国主要生产者都是滚动轴承制造厂,国际标准化组织也将其归为滚动
标签: 2019-09-21

 QQ交流群
QQ交流群

