
CoolDrive A8伺服驱动器在并联机器人上的应用
本文介绍CoolDriveA8伺服驱动器在高速并联机器人上的应用方案,通过测试验证,本系统可很好的达到机器人的应用指标。 概述 并联机器人是一类全新的机器人,它具有刚度大、承载能力强、精度高、自重负荷比小、动力性能好、控制容易等一系列优点,
标签: 2019-09-22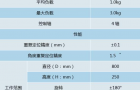
本文介绍CoolDriveA8伺服驱动器在高速并联机器人上的应用方案,通过测试验证,本系统可很好的达到机器人的应用指标。 概述 并联机器人是一类全新的机器人,它具有刚度大、承载能力强、精度高、自重负荷比小、动力性能好、控制容易等一系列优点,
标签: 2019-09-22
内存是大脑和计算机的主要部件。在很多深度学习领域,我们通过和记忆匹配来扩展深度网络的能力,例如,提问与回答,我们先记忆或存储事先处理的信息,然后使用这些信息回答问题。 我们通过将神经网络连接到外部存储资源来扩展神经网络的功能,通过记忆过程与
标签: 2019-09-22
【KUKA结构——工业机器人末端关节结构图】机器人的传动和布局设计从理论上讲应该是比较成熟的领域,如果有样机,拆开一看就可以知道大部分的结构。但是在结构优化设计经验、装配规范的标准化、零配件的按需定制以及供应链优化等方面国内厂商还需要很长时
标签: 2019-09-22
ESTUN智能控制单元完整解决方案(以下简称智能单元),是行业内首个提出针对智能装备制造、自动化产线等,以标准工作单元形式,覆盖机器人控制、运动控制、逻辑控制、视觉控制、模拟仿真控制等功能的运动控制完整解决方案。智能单元方案能够大大提升装备
标签: 2019-09-22
机器人是和电脑、手机一样重要的终端,未来数据量也会是跟电脑、手机一样级别。人工智能是一个非常有AI能力消费的载体。怎么让机器人承担更多工作,取决于大家在人工智能领域的投入。在法务、税务、银行、展厅等领域方面,由机器人替代人的趋势已经非常明显
标签: 2019-09-22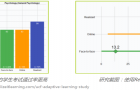
人工智能不仅可以利用图像识别的技术来帮医生看X光片,帮助识别,还可以应用于其他行业,比如教育、汽车、金融领域。未来,我们应该更加关注人工智能,关注人工智能+。 人工智能 互联网VS人工智能 互联网分两个阶段,第一个阶段是电脑端的互联网,第二
标签: 2019-09-22
在实际生活中机器人需要与环境进行交互以执行多种任务,而每个任务都需要进行合理的定位。一种简单的定位检测方法是标注一个图像功能区域数据集,利用这个数据集训练一个深度分类模型,通过模型检测图像中所有可能的潜在功能区域。然而,标注一个这样的大规模
标签: 2019-09-22
摘要:无人艇航向在航行的过程中易收到风浪流等外界干扰,针对干扰频繁打舵修正航向,不仅会加速舵机的磨损,还会增加船舶的功耗。针对这一问题,提出来一种采用模型预测的区间控制算法。该方法将航向参考轨迹和方向舵增量作为在在线优化求解的变量,参考轨迹
标签: 2019-09-22本期专题聚焦“面向智能制造的物流系统建设”主题,围绕智慧供应链、智能物流系统解决方案、智能物流相关技术设备、智能物流信息系统等企业智能物流建设的核心要素,分析需求,探讨问题,提供思路,分享经验。 支持智能制造的物流系统建设概述 在智能制造时
标签: 2019-09-22【八大参数,确定最佳工业机器人选型】下面从9个专业的参数方面,讨论如何选择一个合适的工业机器人。 1、应用场合 首先,最重要的源头是评估导入的机器人,是用于怎样的应用场合以及什么样的制程。 若是应用制程需要在人工旁边由机器协同完成,对于通
标签: 2019-09-22
本文重点介绍工业机器人常用运动学构形,以下是工业机器人的几种常用结构形式(图),图文描述非常详细,希望能对大家带来帮助!! 1、笛卡尔机械臂 优点:很容易通过计算机控制实现,容易达到高精度。缺陷:妨碍工作,且占地面积大,运动速度低,密封性
标签: 2019-09-22
眼尖的小伙伴有没有发现在本次 AMTS 2018 展会现场,来自 SICK 的人机协作安全解决方案在 KUKA 展位的协作机器人展台大显身手,与 LBR iiwa 7 轴协作机器人共同实现安全的人机协作装配,并展示它独有的特长——开放工作区
标签: 2019-09-22
【SICK人机协作安全解决方案出炉】眼尖的小伙伴有没有发现在本次AMTS2018展会现场,来自SICK的人机协作安全解决方案在KUKA展位的协作机器人展台大显身手,与LBRiiwa7轴协作机器人共同实现安全的人机协作装配,并展示它独有的特长
标签: 2019-09-22
没看错吧,横着就出来了,我想静静!对还是切比雪夫好听好看! 4.Jansen连杆机构 是由Jansen发明的,用于模拟平稳行走,Jansen利用这种连杆制造了著名的海滩巨兽,这种连杆兼具美学价值和技术优势,通过简单的旋转输入就可模仿生物行走
标签: 2019-09-22【汽车涂装喷涂机器人的换色及清洗方法】为提高汽车涂装的品质和涂料的利用率,减少汽车喷涂过程中涂料对人的伤害,现在汽车涂装普遍采用喷涂机器人进行喷涂,涂装生产线基本实现了无人化自动喷涂。伴随着人们对汽车产品需求的多样化,单条生产线多车型、多颜
标签: 2019-09-22
目前国内很多工厂车间、电商仓储的物料运输大部分依赖人工完成,无法满足现代工业自动化、柔性化、快速化的生产要求。随着移动机器人在现代工业中被广泛应用,替代人工完成了大量工艺操作,如高效精准上下料、最优分配任务等,有效降低了企业生产成本。下面小
标签: 2019-09-22
如果仅仅有感官和肌肉,人的四肢并不能动作。一方面是因为来自感官的信号没有器官去接收和处理,另一方面也是因为没有器官发出神经信号,驱使肌肉发生收缩或舒张。同样,如果机器人只有传感器和驱动器,机械臂也不能正常工作。原因是传感器输出的信号没有起作
标签: 2019-09-22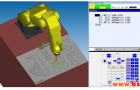
2)示教机器人到新位置; 3)按【SHIFT】+F5【点修正】即可记录新位置,当该行出现@符号时,表示位置信息已更新。 若所修改的位置号在程序中多次出现,则在更新数据时有以下提示: 选择【不是】代表更改程序中所有该位置号对应的位置信息
标签: 2019-09-22
工业机器人具有效率高、稳定性和可靠性好、重复精度高等优势,各大企业纷纷以机器人换人,大量引入工业机器人。机器人在企业的大量应用,使得工业机器人的维护和保养工作重要性日益凸显。机器人管理与维护保养的目的是减少机器人的故障率和停机时间,充分利用
标签: 2019-09-22
随着人工成本不断上涨、人工搬运效率低等问题的出现,传统的人工搬运方式已远远不能达到低成本、高效率、智能化运输车间物料的要求,此时市场对生产制造智能化改造升级的需求也日益凸显。在此背景下,移动机器人无人运输解决方案应运而生。下面我们来看下仙知
标签: 2019-09-22






 QQ交流群
QQ交流群

