
基于STM32的智能自助快递柜控制管理系统
近几年来,随着经济和电子商务的飞速发展, 网购 和 快递 已经走入了人们的日常生活中。目前,国内快递基本为人工投递,对于快递行业而言,这是严峻的考验,同时消费者也对快递行业提出了新的要求。人们关注快递的费用、运输速度和安全性等问题,并期望良
标签: 2019-09-22工业机器人是面向工业领域的多关节机械手或多自由度的机器装置,它能自动执行工作,是靠自身动力和控制能力来实现各种功能的一种机器。它可以接受人类指挥,也可以按照预先编排的程序运行,现代的工业机器人还可以根据人工智能技术制定的原则纲领行动。 一、
标签: 2019-09-22
近几年来,随着经济和电子商务的飞速发展, 网购 和 快递 已经走入了人们的日常生活中。目前,国内快递基本为人工投递,对于快递行业而言,这是严峻的考验,同时消费者也对快递行业提出了新的要求。人们关注快递的费用、运输速度和安全性等问题,并期望良
标签: 2019-09-22
机器人足球的最初想法由UniversityofBritishColumbia,Canada的AlanMackworth教授于1992年正式提出。他在OnSeeingRobots一文中以机器人足球为例,指出传统的机器人研究中存在的不足:Def
标签: 2019-09-22
随车吊可以应用于导弹武器装备运输、导弹半自动填装系统、危险环境救援和果树农产品喷洒农药采摘等。在应用到导弹武器装备中时,导弹武器从生产到作战训练和战场运用都需要运输手段,运输方式包括船舶运输、车辆运输和人员携带等;而装备可靠性与装备运输性能
标签: 2019-09-22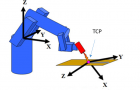
随着机器人变得日益成熟,它们已经能够应用到处理越来越多的工业工序。6自由度(6Dof)机器人能够执行复杂的动作,因而可以在许多复杂的工业任务当中展示良好的性能,比如码垛、搬运、涂胶和焊接等。6自由度机器人可以提举和灵活地操纵重型载荷,并通过
标签: 2019-09-22
当工业机器人技术在不断改进和发展时,越来越多的企业开始采购和使用工业机器人。如何才能知道要选择哪个种类的机器人呢?如何避免我们可能并不了解的那些误区,甚至是那些已经在应用上取得成功而并不适合自己的?工业机器人投资从几万到几百万元的都有,在第
标签: 2019-09-22
随着机器人产业的飞速发展,工业机器人已经广泛应用于各行各业,从材料搬运到机器维护,从焊接到切割,从装配到喷涂,我们发现,这些工业机器人形状各异,功能性能各不相同,那么是什么决定了工业机器人的灵活性和活动范围呢,这个问题比较复杂,但是有一个关
标签: 2019-09-22随着德国工业4.0的提出,智能制造成为制造技术发展的主攻方向。中国制造2025和美国工业互联网等都从国家的战略角度明确了智能制造的核心地位,并且相互间技术的交流与标准融合不断加深。特别是我国从制造大国向制造强国的转型更加迫切,着力发展智能装
标签: 2019-09-22在经历了市场长期的磨砺与发展后,逐渐演变成覆盖我国市场的主导力量,减速机显现出震撼世界的活力。作为工业机器人最核心的功能部件,减速机在整个机器人制造成本中占到33%-38%。当前工业机器人领域方兴未艾,销量节节攀涨,对减速机潜在需求逐年攀升
标签: 2019-09-22工业生产中,传统的工业机器人在生产适用性上已经不能满足日益增长的多任务需求,多轴机器人顺势发展,趋势明显。 多轴机器人是能够实现自动控制的、可重复编程的、多自由度的、运动自由度建成空间直角关系的、多用途的操作机。其工作的行为方式主要是通过完
标签: 2019-09-22
从19世纪50年代第一台数控系统出现到现代开放式数控系统,期间经历了多次重大变化,但是这些变化都局限在单机的功能和单元技术的革新和升级。设备的联网相关技术进展缓慢。 近年来,出现了不同结构层次的数控系统产品,包括全系统、半成品和核心软件,见
标签: 2019-09-22机器人工具快换装置(RoboticToolChanger)通过使机器人自动更换不同的末端执行器或外围设备,使机器人的应用更具柔性。这些末端执行器和外围设备包含例如点焊焊枪、抓手、真空工具、气动和电动马达等。工具快换装置包括一个机器人侧用来安
标签: 2019-09-22
先说kuka库卡机械手设备。库卡(KUKA)机器人公司算是工业自动化领域元老级企业,成立于1898年,总部在德国奥格斯堡。虽然叫机器人公司,设备其实叫机械臂更贴切,在工业制造中需要运用点焊、弧焊、码跺、喷涂、浇铸、装配、搬运、包装、激光加工
标签: 2019-09-22
立 中国智造 之魂,创 工业梦想 之路。中国制造2025已经走在奋进的路上。一条条智能生产线的建立,上百个发明技术的成熟应用,先进的国际化合作理念,领先的创新创业社会实践,这是中国科学院深圳先进技术研究院与时代同步创科技前行的稳健脚步。 2
标签: 2019-09-22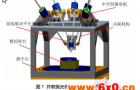
抛光是零件加工的最后一个环节,材料去除量很少,抛光有电化学抛光、磁流变抛光、等离子抛光、超声波研磨抛光和机械抛光等,而机械抛光的效率最高且可控性好,本文提出基于并联机器人技术的自动抛光机床系统设计方案并研制样机,进行了抛光实验。 本文提出基
标签: 2019-09-22
抛光打磨是提高压铸件表面质量最重要的一道工序。针对工艺复杂的压铸件打磨问题,采用双机器人从工件两侧进行协同打磨,可大大提高机器人打磨效率。 目前中小企业大部分仍然采用人工打磨的方式,对工人的身心健康损害极大,少部分采用工业机器人末端执行器夹
标签: 2019-09-22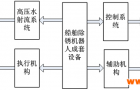
随着世界经济的飞速发展,以船舶为主要工具的远洋运输业正发挥着越来越重要的作用,船舶工业也随之在国民经济中的地位得到显著提高。其中船舶除锈清洗是船舶工业中一项重要的业务,除锈是涂装施工的第一步骤,只有对钢材进行良好的表面前处理,才能使涂层达到
标签: 2019-09-22
数字化电机反馈接口HIPERFACEDSL 大约于五年前上市。从那时起,它便为众多电子驱动技术领域带来技术转变,尤其是在工业4.0和状态监测等方面。这种转变也越来越多地适用于机器人技术和操纵技术。因此,KOLLMORGENEuropeGmb
标签: 2019-09-22
电-机械转换器是电液比例控制元件的关键驱动元件,它可将外界输入的电压信号连续成比例地转换成往复直线位移,可以产生同尺寸结构2.5倍的电磁力,并因其高线性和小滞环特性而受到广泛关注。 传统结构的线圈组件在运动过程中,磁性材料内部易产生涡流,使
标签: 2019-09-22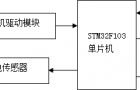
摘要:移动式机器人主要由遥控操作器、自动控制系统和传感器等三部分为移动载体而组成系统。移动式机器人的核心技术是控制系统,其中运动控制技术是关键环节。本文以移动机械手作为研究对象,设计了一种准确抓取物体的运动控制系统,利用模糊控制算法控制移动
标签: 2019-09-22






 QQ交流群
QQ交流群

