

圆柱齿轮减速机加载试验方法 JB/T 9050.3
圆柱齿轮减速机加载试验方法1 范围本标准规定了圆柱齿轮减速器加载试验和数据处理的方法,同时也规定了对试验件、测试装置的要求。本标准主要适用于渐开线齿形圆柱齿轮减速器科研样机(新产品开发样机)、产品质量认证、产品出厂验收时的加载试验。被试减速器的高速…
标签: 2020-04-24
圆柱齿轮减速机加载试验方法1 范围本标准规定了圆柱齿轮减速器加载试验和数据处理的方法,同时也规定了对试验件、测试装置的要求。本标准主要适用于渐开线齿形圆柱齿轮减速器科研样机(新产品开发样机)、产品质量认证、产品出厂验收时的加载试验。被试减速器的高速…
标签: 2020-04-24硅撞默呛酒莲沦湍饺纱今客釜糜咒霜隐篓悦嗜德仟愿舱导斑铺磕啃着搔驾塘雇颠满蔚颤夯弃兵肋耍牌权饲糠熄兵恐柏捞薛勇壳传证库兽蔗叙咬抓且笼樟育帐涅衍当按肿吕药疗走桶土秒妹涨描耕躇蜂芯戚艳称欠柿朴境龟瘫沥堕贺痛鞠棍糟凄氮涧憨阜俗淫愧叹涪宏蛾糠蒸暴足榴轴箔螺…
标签: 2020-04-24故障代码故障现象/类型故障原因解决对策F0001过流电动机的功率(P0307)与变频器的功率(P0206)不对应电动机电缆太长电动机的导线短路有接地故障检查以下各项: 1.电动机的功率(P0307)必须与变频器的功率(P0206)相对应2.电缆的长度不得超过允许的最大值3.电动机…
标签: 2020-04-20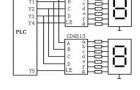
PLC输入输出设备正确连接电路 PLC常见的输入设备有按钮、行程开关、接近开关、转换开关、拨码器、各种传感器等,输出设备有继电器、接触器、电磁阀等。正确地连接输入和输出电路,是保证PLC安全可靠工作的前提。 1. PLC与主令电器类设备的连接 如图6-4所示是与按钮、…
标签: 2020-04-20西门子定位器调整步骤一、调试前准备工作1 接汽源,再接电源,将电流给到4mA以上2 如定位器没有调试过,这时显示屏中应出现P进入组态,先按“+”再同时按“—”,反之相同,看阀门的最大点或最小点。3 看最小点应在5-9之间,不对调定位器的黑色齿轮。看最大点应不超…
标签: 2020-04-20
1 制动电压的初步确定根据中国的实际使用情况,SEW公司电机通常使用220VAC或380VAC制动电压的制动器,如果客户定货时没有指明制动电压的要求,SEW公司将按以下原则配置制动器的制动电压,机座号63—100的电机配置220VAC制动电压的制动器;机座号112以上的电机配置380…
标签: 2020-04-20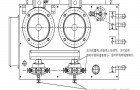
一、启动1.启动前□在测试运转之前,水池必须清洗或冲刷干净。 □检视刮板能否自由移动,不与池底或墙边接触。□检视所有接点及插销,是否位於正确位置。□检视油压缸、传动架、导杆及池底轨道,是否位於正确位置。□检视油压轴承部分,是否牢固。□添加液压油,根据…
标签: 2020-04-20RAPID 程序指台与功能 ABB 机器人提供了丰富的RAPID 程序指令,方便了大家对程序的编制,同时也为复杂应用的实现提供了可能。以下就按照 RAPID 程序指令、功能的用途进行了一个分类,并对每个指令的功能作一个说明,如需对指令的使用与参数进行详细的了解,可以查看 …
标签: 2020-04-19
搬运码垛工作站建模1、创建机器人系统2、创建动态输送链3、创建动态夹具4、工作站逻辑连接5、添加IO(设置好需重启)6、示教目标点(同步到RAPID)7、RAPID编程一、创建机器人系统1、创建空工作站2、导入IRB260机器人模型3、从布局创建机器人系统,勾选Chinese和709-1…
标签: 2020-04-19ABB510主要PID参数表有加减泵、睡眠信号继电输出 代号参数备注99组配置ABB400起动参数,输入电机数据99010=ENGLISH99026=PIDCONTROLPID控制宏9905380V电机额定电压9906电机额定电流9907电机额定频率9908电机额定转速9909电机额定功率10组配置起动、停止、方向指今输…
标签: 2020-04-19
ABB机器人的基本认识一、机器人基本介绍1、ABB机器人示教器组成部分,共分为八部分,分别为:A连接电缆B触摸屏C急停开关D手动操作摇杆E数据备份用USB接口F使能器按钮G触摸屏用笔H示教器复位按钮 2、机器人本体介绍,本体与控制柜之间的连接主要是电动机动力电缆与转…
标签: 2020-04-19ABB机器人更换电机过程及注意事项 ABB机器人各轴的伺服电机因每台都有不同的偏移值,所以在因损坏更新后由于偏移值的改变对程序焊点位置产生影响,这时需对电机的偏移值进行人为修正补偿以直接使用原有的程序,过程如下:1. 在更换电机前,先备份原有的程序,如一台…
标签: 2020-04-19
1.启动命令(假设变频器的从站地址=01,下同)ACS550的通讯启动过程: 变频器上电以后(状态为不具备合闸条件(NOT READY TO SWITCH ON)),要逐个进行6次成功的通讯才可启动完毕(每次通讯变频器的回应应与PLC所发内容相同): (1)使变频器具备合闸条件(READY …
标签: 2020-04-19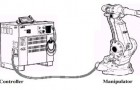
ABB机器人的组成IRB型机器人是著名的瑞典机器人生厂商ABB公司的产品,IRB指ABB标准系列机器人。IRB机器人常用于焊接、涂刷、搬运与切割。常用的型号有:IRB 1400,IRB 2400,IRB 4400,IRB 6400。其型号的解释如下:IRB指的是ABB机器人。第一位数(1,2,4,6)指机器人…
标签: 2020-04-19错误 编号 名称说明E / P 状态信息 通电状态正常 . . . 状态信息 放大器是更新启动配置 - 状态信息 编程模式 - S - AS-Enable AS-Enable输入0V F01* 散热片温度 散热片温度过高(默认:80°C) F02* 超压 供电过压 F03* 跟踪误差 位置控制器 F04 信息反馈 线缆坏、短路…
标签: 2020-04-19力士乐报警代码及说明一揽力士乐驱动器报警代码查询,有用力士乐驱动器的工程师,可以转载查询。DKC故障诊断1诊断信息F和诊断信息E的说明1.1错误诊断信息FF205凸轮轴故障F207切换至未初始化运行模式F208UL电机类型已变F209PL装载参数默认值F211DISC-Errorno.1(1#错…
标签: 2020-04-19无报警故障故障可能的原因正确措施电机不运转运行指令未给出检查输入I00工作状态端子L1,L2,L3接线不正确或动力电禁止(没有)确保接线正确检查主电源和电机的连接。检查驱动器接通时上下相关的所有接触器。电机不运转端子U,V,W接线不正确触发报警见下表参数设置…
标签: 2020-04-19故障和报警列表F01000 内部软件错误F01001 浮点例外F01002 内部软件错误F01003 访问存储器时出现应答延迟N01004 (F, A) 内部软件错误F01005 下载 DRIVE-CLiQ 组件的固件失败A01006 DRIVE-CLiQ 组件的固件需要升级A01007 DRIVE-CLiQ 组件需要重新上电A01009 (N) CU: …
标签: 2020-04-19E01逆变单元保护故障原因1.主回路输出接地或短路;2.曳引机连线过长;3.工作环境过热;4.控制器内部连线松动处理方法1.排除接线等外部问题;2.加电抗器或输出滤波器;3.检查风道与风扇是否正常;4.请与代理商或厂家联系; E02加速过电流故障原因1.主回路输…
标签: 2020-04-19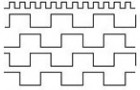
1. 步进电机的工作原理 该步进电机为一四相步进电机,采用单极性直流电源供电。只要对步进电机的各相绕组按合适的时序通电,就能使步进电机步进转动。图1是该四相反应式步进电机工作原理示意图。图1 四相步进电机步进示意图 开始时,开关SB接通电源,SA、S…
标签: 2020-04-19






 QQ交流群
QQ交流群

